




Tutti i servodrive HDT sono configurabili per pilotare diverse tipologie di motori. Oltre al controllo dedicato ai motori brushless, possono pilotare i motori in corrente continua a magneti permanenti ma anche i motori asincroni sia in V/Hz che in orientamento di campo FOC (Controllo Vettoriale).
Da alcuni mesi tutti i servoazionamenti della serie NTT e TomCat si sono arricchiti della funzione software che li trasforma, in base alle esigenze del cliente in veri e propri inverter con potenze da circa 1kW fino a 120kW.
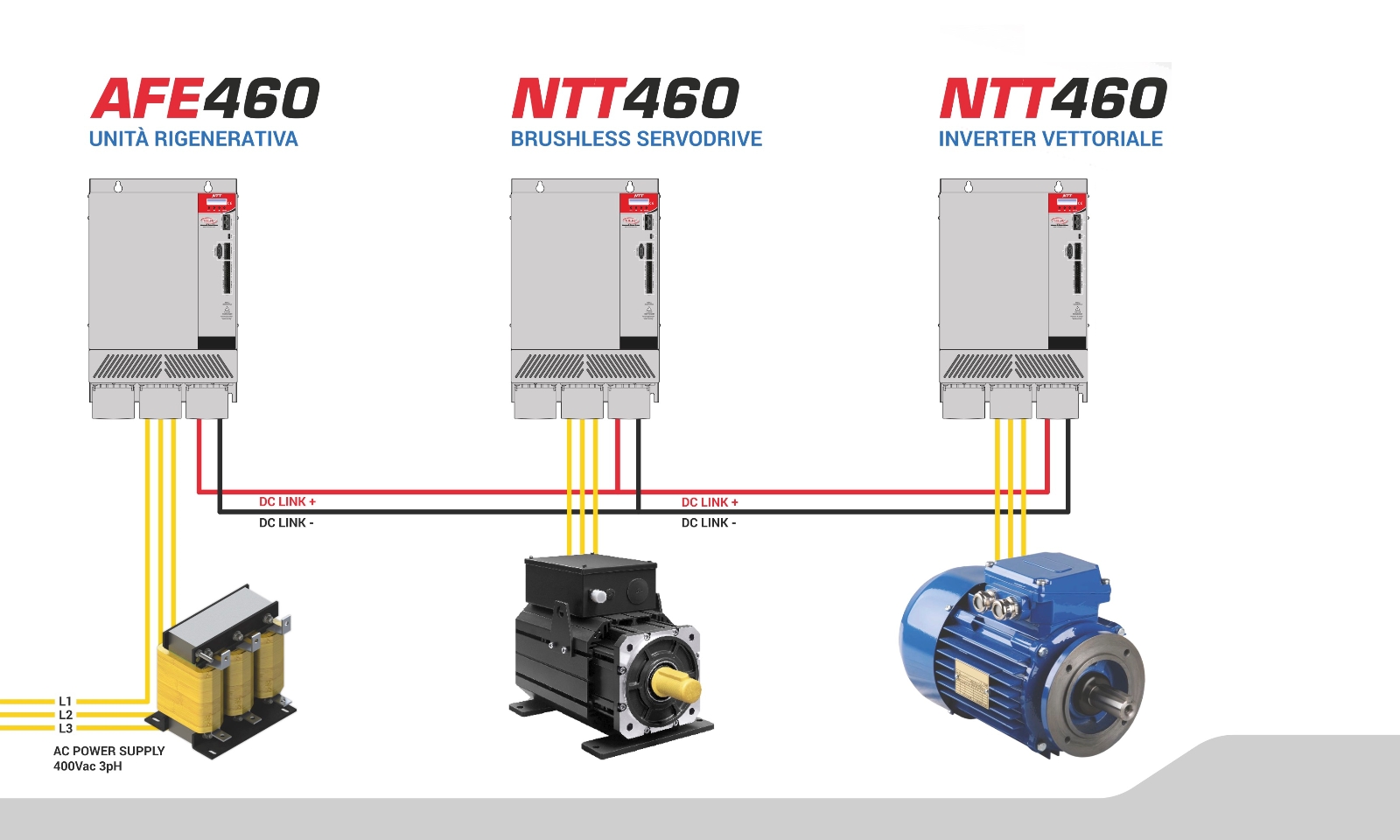
Tutte le caratteristiche di base del servodrive per motori brushless sono rimaste disponibili ed in base al tipo e al modello si possono sintetizzare con la presenza di un filtro di rete EMC interno fino a 10kW, un chopper interno di frenatura, una resistenza di frenatura fino a 5kW, l’alimentazione da bus DC oltre che da corrente alternata e le funzione di sicurezza STO integrate a bordo su tutti i modelli.
La configurazione inverter permette di scegliere tra il semplice controllo in tensione e frequenza, volgarmente detto V/Hz o nella più complessa modalità a controllo Vettoriale, anche detta FOC, ovvero Field Oriented Control (Controllo di Orientamento di Campo).
La modalità di funzionamento V/Hz è previsto principalmente per le applicazioni di tipo mandrino dove NTT e TomCat (TMC) possono gestire frequenze in uscita fino a 1000Hz portando un motore a due poli potenzialmente fino a 60.000rpm. Non è previsto alcun anello di regolazione. Basta inserire i semplici parametri relativi ai numeri di giri del motore, la frequenza e la tensione. Se presente un encoder, la lettura, eseguita dal drive, viene utilizzata solo a scopo di visualizzazione.
La seconda modalità di funzionamento è un raffinato controllo ad Orientamento di Campo (FOC) perfetto per applicazioni di automazione industriale siano esse relative al controllo di ventilatori, impianti di pompaggio, ma anche sistemi di sollevamento e movimentazione industriali che richiedano precisione. Infatti l’inverter può lavorare in modalità FOC sia con che senza trasduttori di posizione sul motore. La frequenza massima di lavoro in questa modalità è di circa 500Hz.
Con la modalità FOC in sensorless il drive stima la posizione del motore e vengono effettuate regolazioni sulla velocità e corrente (lavorando in controllo di velocità).
Con la modalità FOC con retroazione da trasduttore è possibile ottenere un comportamento dinamico e precisioni simili a quelle di un brushless. L’inverter lavora con l’anello di posizione chiuso ed è quindi possibile regolare in modo fine gli anelli di posizione, velocità e corrente effettuando anche il controllo di coppia.
Gli inverter dispongono di un software di autotuning dei dati motori che calcola in autonomia i parametri del motore asincrono che gli viene abbinato.
L'inverter in base ai parametri motore inseriti e a quelli rilevati esegue un deflussaggio automatico per poter salire in velocità quando richiesto.
E' possibile selezionare vari algoritmi di controllo in base al tipo di applicazione tra cui tensione/corrente, Luenberger o Kalman.
Fieldbus e controllo.
I servodrive anche nella modalità inverter mantengono tutte le possibilità di controllo presenti nella modalità Servodrive per il controllo di motori brushless.
Quindi possono essere comandati tramite ingressi analogici oppure possono essere dotati di tutti i bus di campo come EtherCat, ProfiNet, Ethernet IP, CanOpen e Modbus RTU.
Alcune funzionalità dei bus di campo, in particolare a livello di interpolazione, saranno ovviamente limitate dalla presenza o meno di un feedback da trasduttore o dal tipo di controllo prescelto, se V/Hz o FOC.
Sicurezza ed STO
Tutti gli inverter mantengono la gestione della sicurezza STO che è di livello SIL3 in categoria di arresto 0.
Connessione per la gestione del drive da locale e da remoto.
Gli inverter sono programmabili dal software Caliper tramite una connessione da USB a µUSB. Nel servodrive NTT è presente anche una porta EtherNet che consente sia l’accesso da software Caliper alternativo alla USB sia la possibiltà di gestire il drive da remoto.