



Il resolver, trasduttore elettromeccanico rotativo analogico è stato per oltre 25 anni l'indiscusso protagonista tra i feedback di posizione utilizzati dai costruttori di motori brushless di tutto il mondo.
Per HDT rappresenta a tutt’oggi una garanzia di qualità e robustezza e quindi lo pone ancora come protagonista nelle scelte raccomandate come sensore di posizione per i propri motori. Più risoluto della maggior parte degli encoder e soprattutto robusto, non teme la polvere, né le temperature difficili, nè le vibrazioni. La risoluzione che si può raggiungere con i servodrive di HDT, in particolare con la famiglia NTT, è di ben 16Bit, limite oltre al quale il resolver deve per forza cedere il passo al suo alterego digitale, l’encoder assoluto.
Ecco quindi che laddove serva maggior risoluzione per ottenere un miglior controllo sia del motore che del moto dell’asse collegato è necessario dotare il motore di encoder assoluto.
L'encoder assoluto per motori elettrici è un dispositivo elettromeccanico costituito da una parte fissa e una rotante e in grado di convertire la posizione o il moto angolare della parte rotante in un codice digitale assoluto. In parole semplici l’encoder assoluto montato sul motore fornisce al drive l’informazione della sua posizione assoluta in termini di angolo e nel caso degli encoder assoluti multi-giro anche il codice delle rotazioni eseguite.
Gli encoder relativi, detti anche Incrementali, forniscono invece dei segnali elettrici d'uscita proporzionali allo spostamento del rotore rispetto alla parte fissa che consentono di leggere la velocità e l'accelerazione del motore ma non la posizione istantanea. Per ricavare la posizione assoluta del rotore è necessario mantenere un costante conteggio dei segnali elettrici d'uscita rispetto ad un punto iniziale. Il punto iniziale va creato a priori attraverso un'operazione iniziale di ricerca riferimento o ricerca di Homing. Tale operazione viene normalmente eseguita da ogni azionamento collegato ad un motore con encoder incrementale all’avviamento di un macchinario. Ogni asse/motore viene portato a fare una ricerca della posizione di base caratterizzata ad esempio dalla presenza di un fine corsa che nel momento in cui viene letto azzera i contatori e imposta questa posizione come posizione di zero o posizione di Home. Da questo momento, la posizione del rotore e quindi dell’asse sarà nota per il costante aggiornamento dello spostamento rispetto a questo "zero". In caso di assenza di segnale elettrico, tale riferimento viene perso ed il sistema deve eseguire nuovamente la procedura di homing, facendo ruotare fino a ritrovare il suo fine corsa per stabilire il punto esatto in cui si trovava.
Negli encoder assoluti invece i segnali elettrici d'uscita forniscono una esatta posizione istantanea del rotore rispetto al corpo sotto forma di codice così che in qualsiasi momento, un servodrive o un controllo possa decodificare e visualizzare la posizione angolare dell'asse in esame. I dati relativi allo spostamento dell'asse (direzione, velocità e accelerazione) sono derivati dall'elaborazione della sua posizione assoluta nel tempo. Non è quindi necessario alcuna procedura di homing e neppure la presenza di un fine corsa.
L'informazione della posizione assoluta può essere portata in due modi: attraverso un segnale sinusoidale complesso che permette l'identificazione della posizione oppure attraverso una informazione digitale trasmessa attraverso un protocollo digitale.
Nel primo caso si parla di segnali di tipo SinCos, mentre nel secondo caso le informazioni digitali che vengono inviate tramite un hardware seriale sono affidati a protocolli che possono essere di tipo “proprietario” o “non proprietario”.
Interfaccia digitale BiSS
Varie sono le interfacce digitali e i relativi protocolli, ovvero i diversi tipi di codifica utilizzati dai vari costruttori di Encoder Assoluti per trasmettere le informazioni di posizione a drive e controlli. Alcuni produttori hanno sviluppato dei propri standard, definiti di tipo "proprietario", che ovviamente permettono la comunicazione solo con apparecchiature in grado di leggerne e riconoscerne il codice. Accanto ai sistemi "proprietari" esistono degli standard aperti che vengono utilizzati da più costruttori di encoder concorrenti.
In particolare tra i più famosi si ricordano:
- Endat 2.1 – Proprietario Heidenhain
- Endat 2.2 – Proprietario Heidenhain
- Hyperface – Proprietario Sick
- SSi – Protocollo di tipo Open source
- BiSS-B – Protocollo di tipo Open source
- BiSS-C – Protocollo di tipo Open source
I servodrive di HDT sono in grado di leggere e riconoscere tutti i protocolli citati ma per i suoi motori ha scelto di utilizzare come standard il protocollo BiSS-B e BiSS-C in quanto in primis è un protocollo open source molto diffuso e quindi permette la scelta tra un’ampia gamma di encoder di fornitori diversi, tutti compatibili tra loro, garantendo libertà di scelta e in seconda battuta è molto veloce e prevede elevati standard di sicurezza nella trasmissione dei dati.
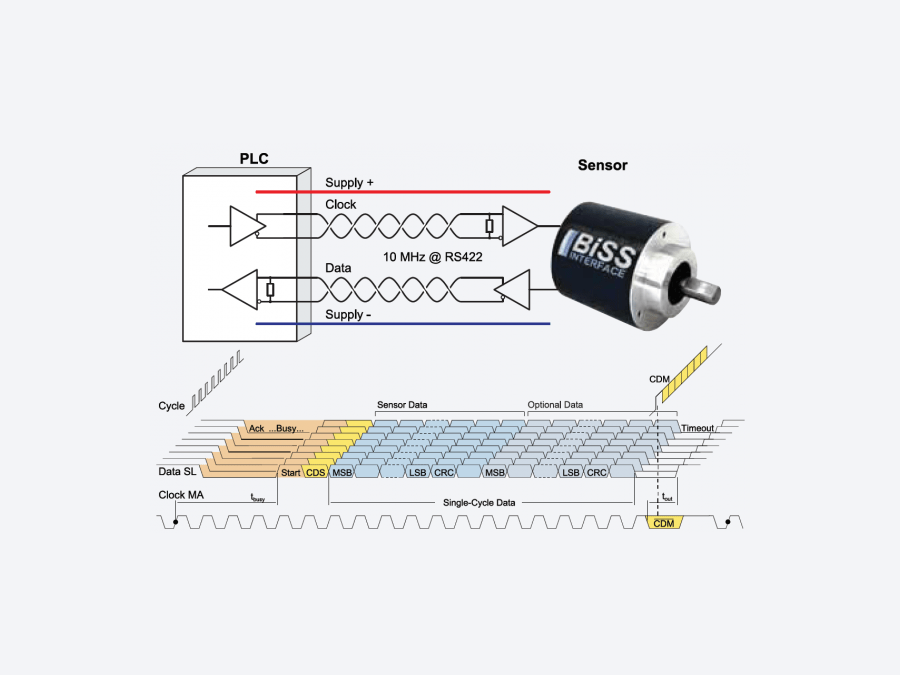
BiSS è l'acronicmo di Bidirectional Interface Serial Synchronous, ovvero un'interfaccia Bidirezionale Sincrona Seriale di tipo Open Source. Interfaccia pensata e dedicata ai sensori e agli attuatori.
L'interfaccia BiSS è stato sviluppato a partire dall’interfaccia SSI e INTERBUS semplificato ed è in concorrenza per prestazioni e performance con gli standard proprietari, Hiperface ed EnDat.
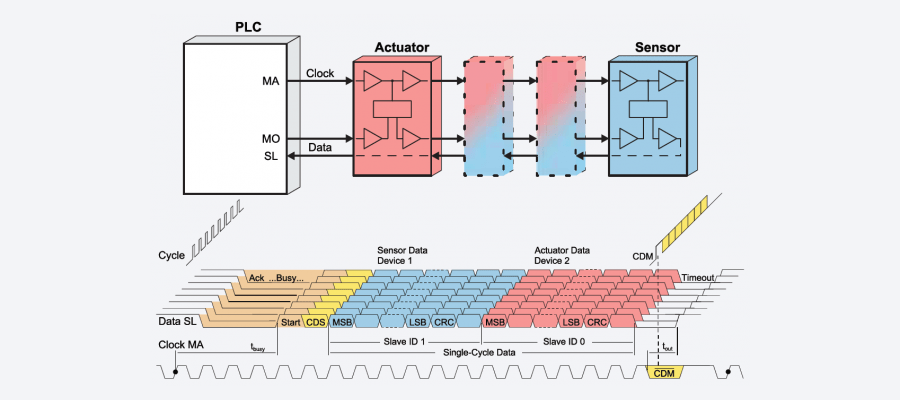
BiSS è compatibile a livello hardware con lo standard industriale SSI (Serial Synchronous Interface) ma offre funzionalità e opzioni aggiuntive come la comunicazione bidirezionale dei dati (seriale sincrona, comunicazione dati continua) e due linee unidirezionali di clock e dati ciclici ad alta velocità (fino a 10 Mbit/secondo anche per cavi lunghi 100m) con compensazione del ritardo di linea per il trasferimento di dati ad alta velocità, per richiedere tempi di elaborazione per la generazione di dati nello slave, per la sicurezza (CRC, errori, avvisi) e per poter gestire più slave e dispositivi eventualmente collegati. Viene utilizzato in applicazioni industriali che richiedono velocità di trasferimento, sicurezza, flessibilità e uno sforzo di implementazione ridotto al minimo.
Soluzioni HDT. Encoder assoluto BiSS a 22Bit e a 17Bit
HDT per i propri motori ha scelto il meglio, definendo due tipologie di encoder assoluti con interfaccia BiSS.
Un encoder induttivo da 17Bit sul giro e 16Bit sul multigiro, esclusivamente digitale, ovvero non dotato di canali SinCos, di dimensioni compatte per poter essere installato anche nei motori più piccoli e dedicato alle applicazioni meno impegnative in termini di risoluzione sul giro e dal costo più contenuto.
Un encoder ottico da 22Bit sul giro e 12Bit sul multigiro per le applicazioni che richiedono maggior precisione e controllo dotato anche dei segnali SinCos che permettono di alzare la risoluzione fino a 34 Bit teorici quando l'applicazione ha bisogno di elevata precisione a bassi giri del motore.
Ulteriori informazioni possono essere trovate sul sito del consorzio BiSS.