



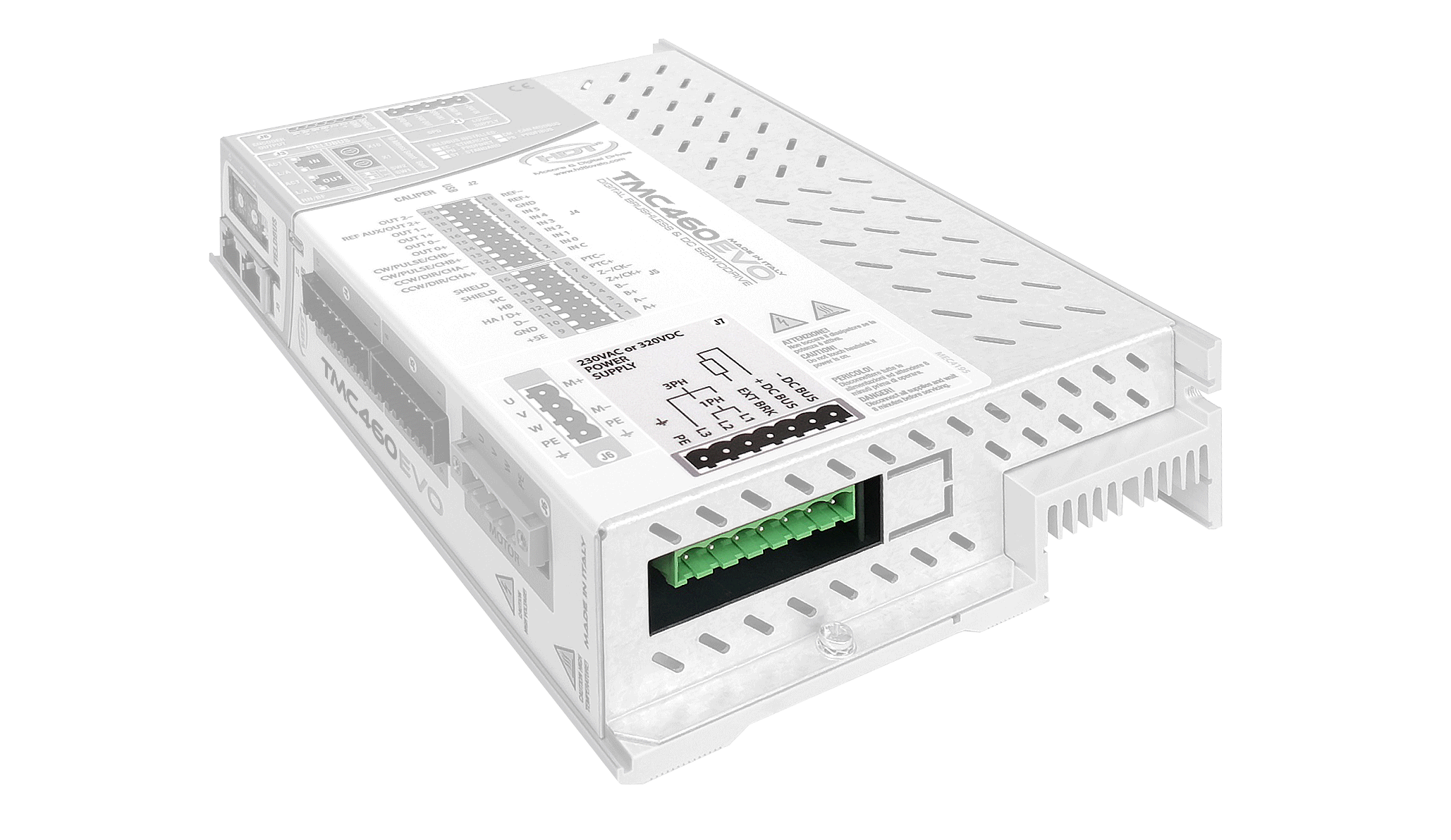
TomCat460 Evo
TomCat.L'evoluzione della specie.
...ora anche a 400VAC

Riprogettato in grande stile.
Nuovo processore a 32Bit. |
|
| Processore di ultima generazione a 32-Bit con una capacità di calcolo in FPU a 32-Bit. Frequenza della PWM standard di 10kHz selezionabile da 2kHz fino a 20kHz e una banda passate di 1600Hz. |
|
Firmware ottimizzato. |
|
| Più reattivo e performante grazie al firmware riprogettato per essere snello e leggero. Applicativi di serie per posizionamenti complessi, gestione di assi elettrici, di camme elettroniche o semplicemente per il controllo di coppia e velocità. Dedicato a chi cerca l'economicità senza rinunciare alle prestazioni. |
|
Connettività a tutto campo. |
|
| Nuovi bus di campo per adattarsi a una grande varietà di situazioni. Dall'intramontabile CANopen al sempre versatile Modbus si aggiunge il potente EtherCAT CoE e l'imperante ProfiNet per cogliere le opportunità di lavorare con il mondo Siemens TomCat non conosce limiti. |
|
Controllo motore: non più solo brushless. |
|
| Un unico servodrive per gestire qualsiasi tipo di motore. Brushless rotativo, brushless lineare, asincrono, mandrino, in corrente continua a magneti permanenti. La flessibilità che cercavi. |
|
Resolver. L'opzione che mancava. |
|
| Oltre alla lettura di Encoder Incrementali con sensori di Hall o Encoder Assoluti di tipo SSI abbiamo aggiunto l'opzione per la lettura del Resolver con una risoluzione a 16Bit. La precisione e la robustezza necessaria per gli ambienti di lavoro gravosi. |
|
DC Bus. Quando ambiente e risparmio vanno a braccetto. |
|
| TomCat aggiunge il DC Bus per poter trasferire da un drive all'altro l'energia generata durante il rallentamento anzichè disperderla nell'ambiente tramite la resistenza di frenatura. Soluzione semplice ed economica per il risparmio energetico e la tutela dell'ambiente. |
|
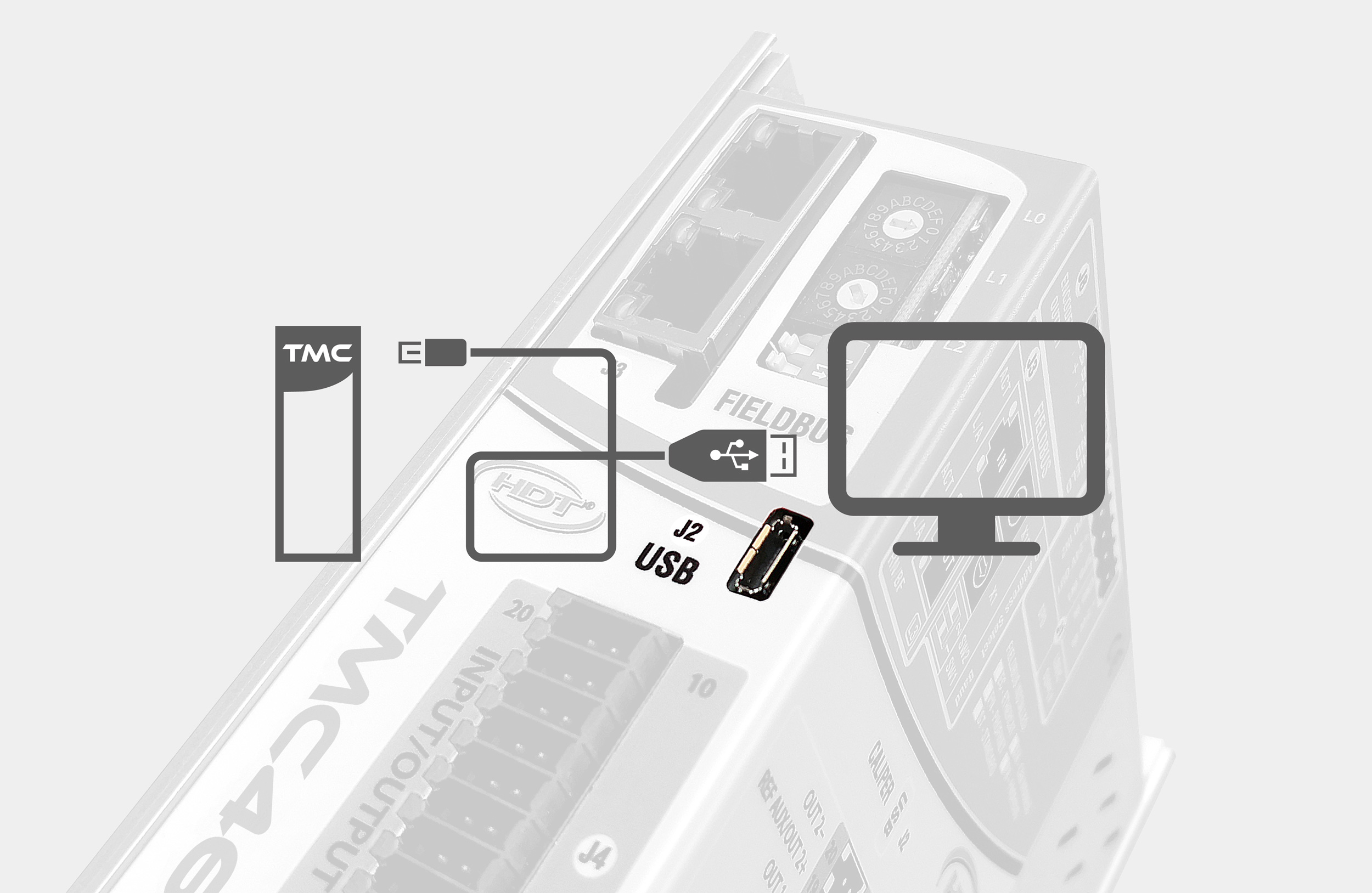
USB 2.0. La comodità si fa strada. |
|
| Porta µUSB di tipo 2.0. L'abbiamo scelta perchè veloce, ma sopratutto perchè comoda. Basta con convertitori seriali o USB/seriale che fanno impazzire. Ora per connetterti a Caliper, il nostro tool di parametrizzazione, basta un semplice cavetto ed il gioco è fatto. Viva la semplicità. |
|
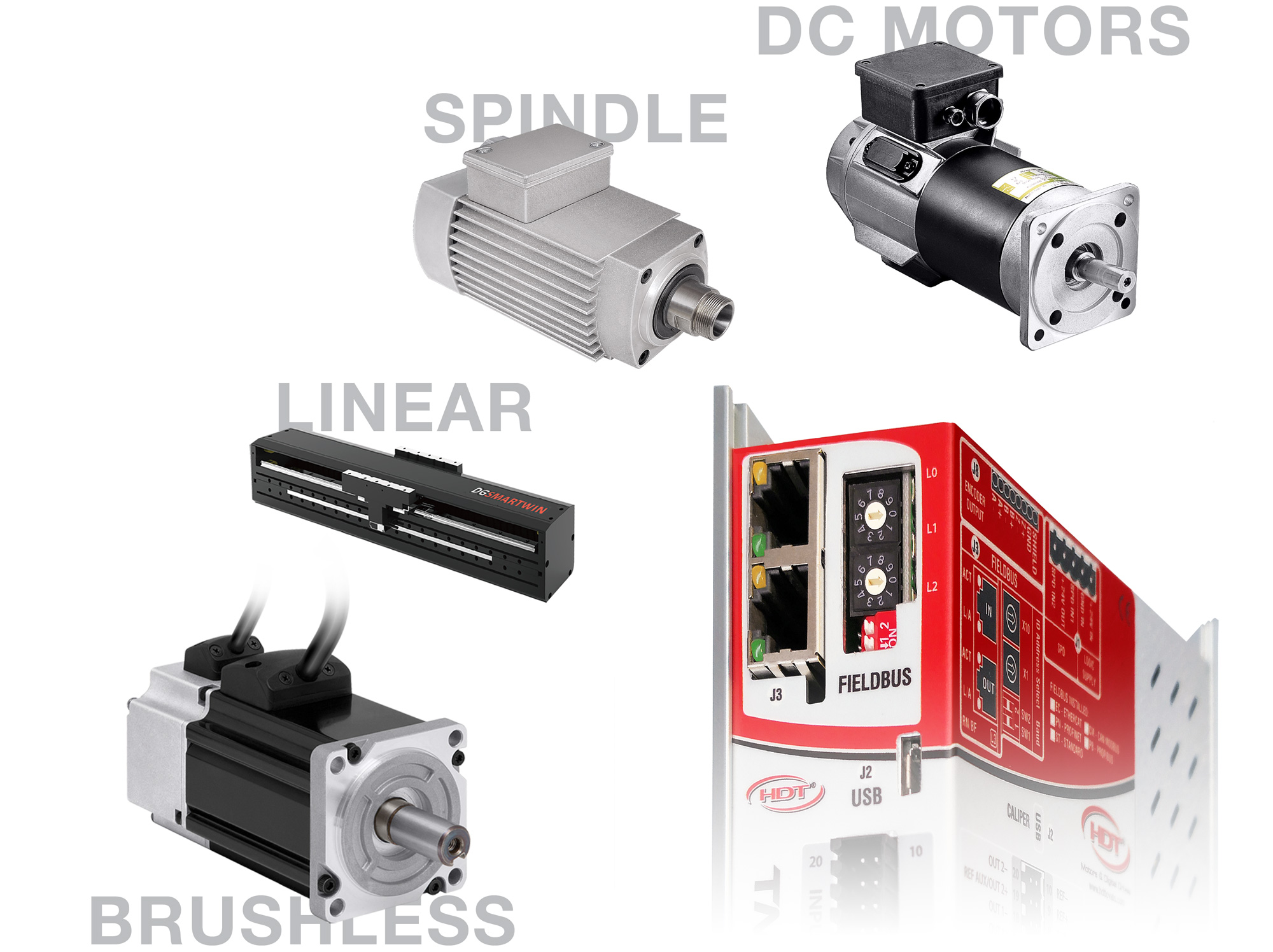
Controllo Motore.
Non solo brushless.
TomCat460 Evo è in grado di controllare indifferentemente motori sincrono (brushless) rotativi e lineari, motori in corrente continua a magneti permanenti dotati di encoder ma anche motori asincroni/mandrino in controllo V/F (Volt/Hertz) o FOC (Vettoriale) con frequenze fino a 1200Hz.
Questo vi consentirà di gestire gli assi per posizionamenti o interpolazioni ma anche di poter gestire eventuali mandrini asincroni per forature, fresature o altre applicazioni ad alta velocità.
Un drive davvero unico con una flessibilità incredibile.
Feedbacks.
Encoder incrementale.
Un ingresso principale per la lettura di Encoder Incrementali con o senza sensori di Hall. Segnale 5V line drive, push-pull o Open Collector.
Specifica uscita dedicata alla ripetizione del segnale encoder.
Encoder Assoluto SSI, BiSS, Endat.
Lo stesso ingresso principale può essere utilizzato per la lettura sia di encoder assoluto digitale SSI binario, BiSS (B-C) o Endat 2.1/2.2 a 32Bit sul giro e 16bit sul multigiro
Encoder esterno.
Un secondo ingresso è dedicato alla lettura di un encoder incrementale ausiliario esterno posizionato sull'applicazione di tipo rotativo o lineare
Opzione Resolver.
Lo stesso ingresso può essere abilitato per la lettura di Resolver con risoluzione a 16Bit con specifica uscita dedicata alla simulazione encoder.
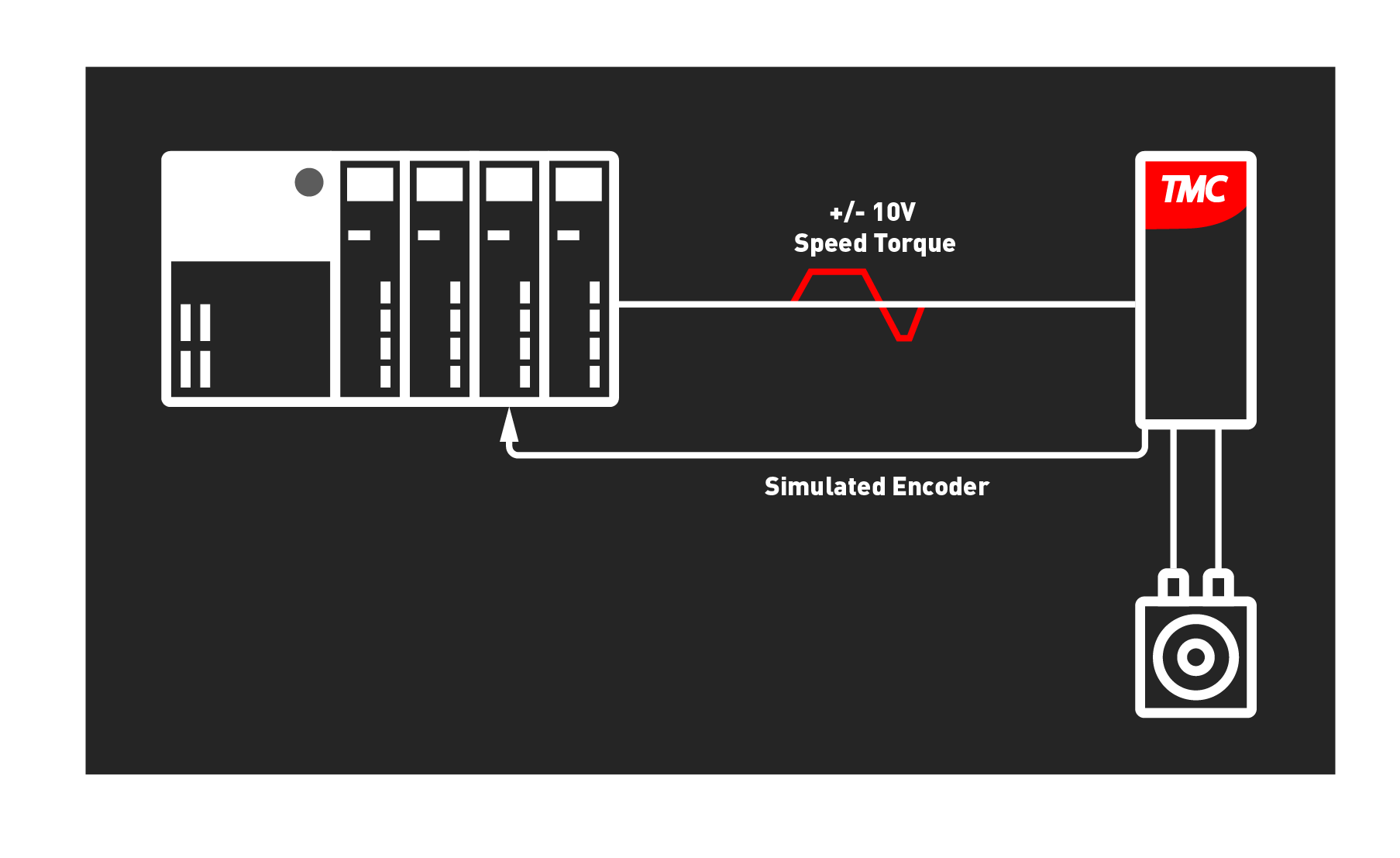
Riferimenti Analogici.
In linea con la tradizione occidentale.
Per il controllo di moto tradizionale attraverso il segnale analogico +/-10V e 0/10V, TomCat460 Evo è dotato di due ingressi a 12Bit.
Un ingresso dedicato al riferimento principale di velocità o coppia o per la lettura del trasduttore di pressione.
Un secondo ingresso dedicato ad un riferimento secondario di velocità o di limite di coppia o di posizione.
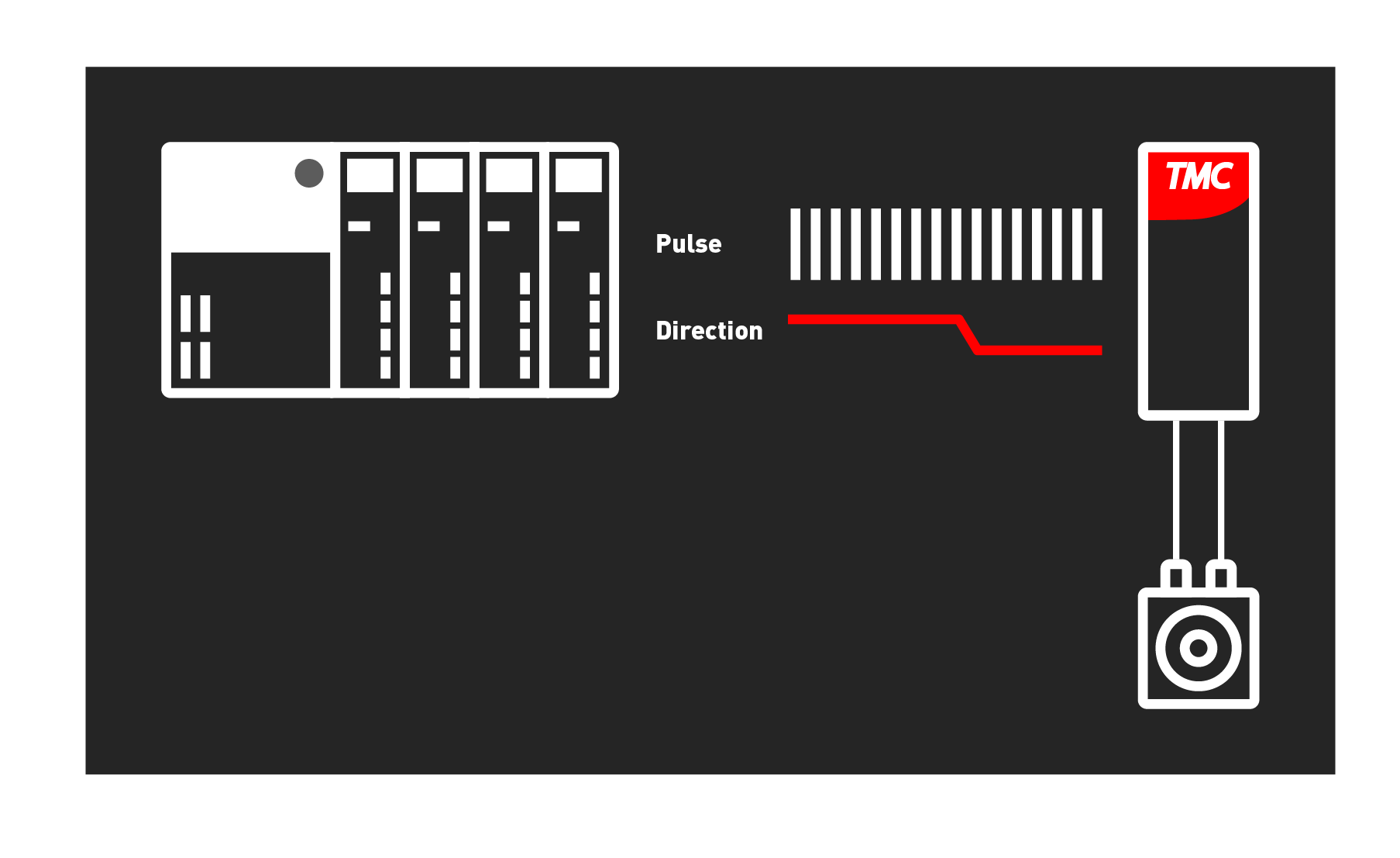
Riferimenti in frequenza.
La più diffusa in Asia.
Per il controllo da PLC attraverso comando in frequenza e direzione o in frequenza CW/CCW, TomCat460 Evo dispone di due ingressi che ricevono fino a 2MHz per canale.
Lo stesso ingresso gestisce anche una eventuale retroazione da encoder incrementale A/B esterno.
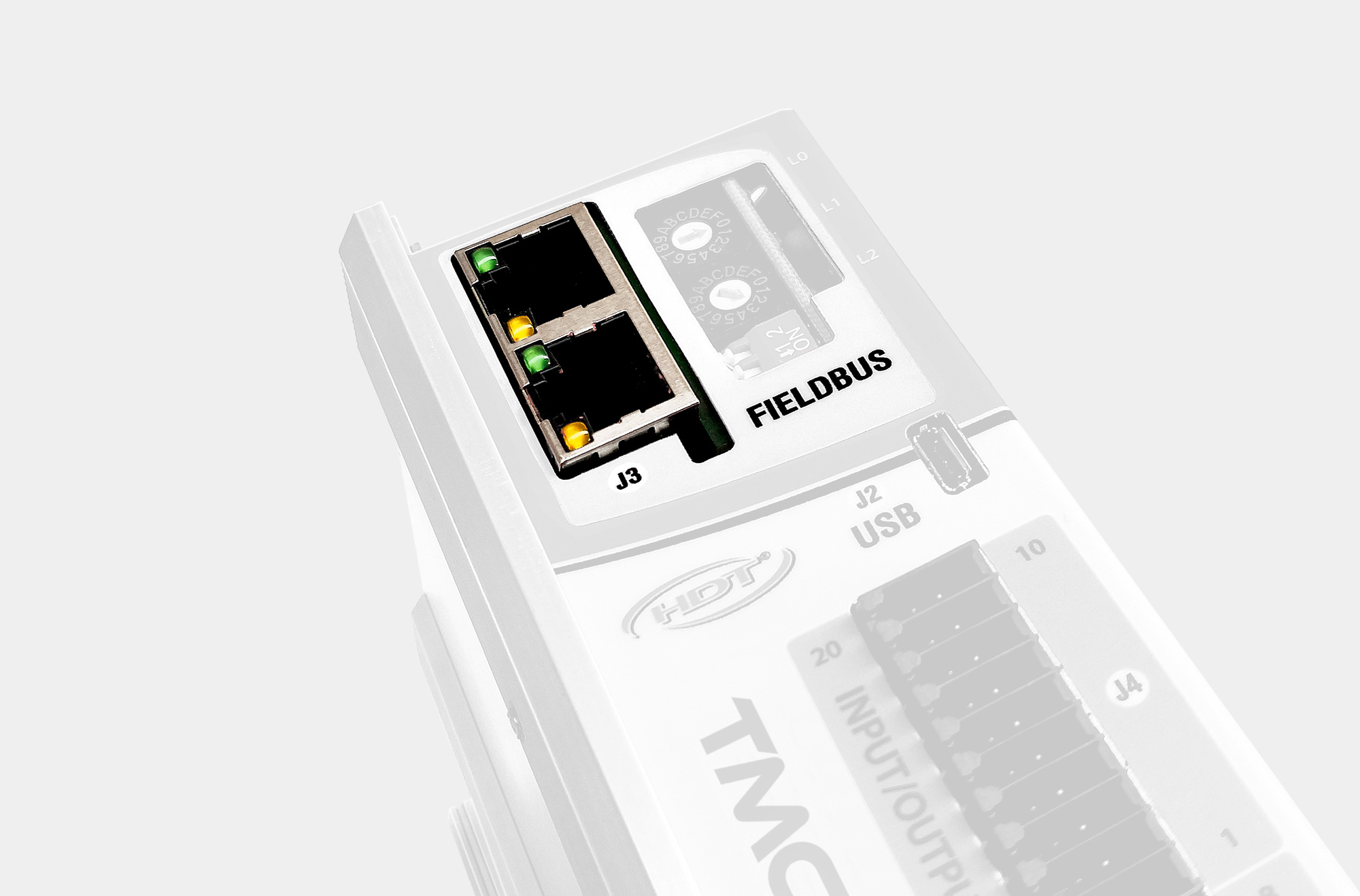
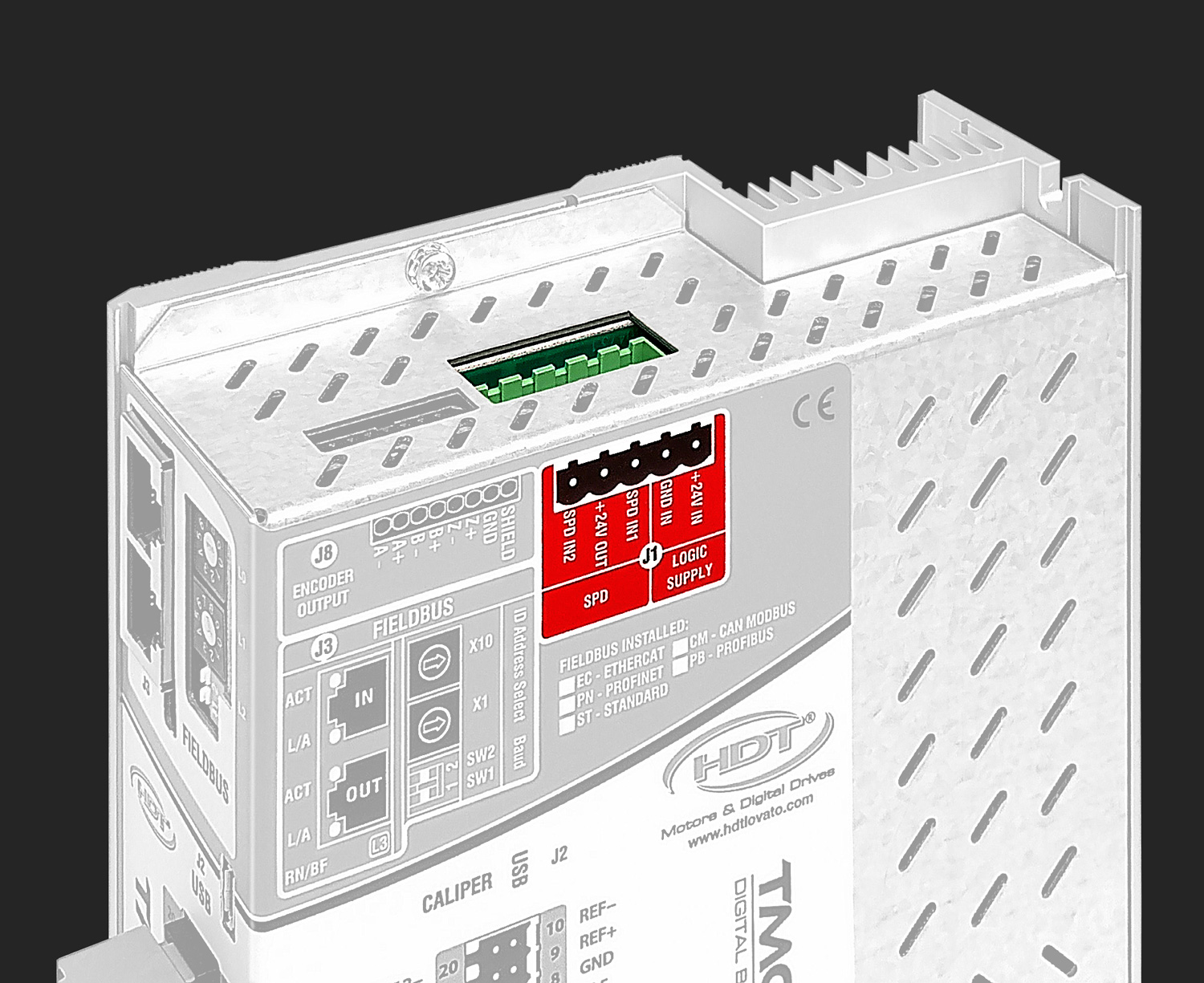
Fieldbus.
Diplomato in lingue.
Con nuovi bus di campo TomCat240 Evo allarga le possibilità di interazione con il mondo dei PLC e CN più avanzati.
EtherCAT CoE il protocollo real-time più potente e versatile per applicazioni Motion con interpolazioni rapidissime.
ProfiNet RT/IRT il protocollo real-time per dialogare con i PLC e CNC più importanti sul mercato.
EtherNet/IP il protocollo su base Ethernet (IEEE802.3) per applicazioni di automazione industriale.
CANopen Cia402, la flessibilità ed economicità di un protocollo aperto.
Modbus RTU la robustezza di un protocollo seriale per i posizionamenti.
Gli manca solo la parola
EtherCAT
EtherCATProtocollo CiA 402Il protocollo EtherCAT CoE è uno standard per lo scambio dati in automazione industriale, in gergo un bus di campo, di tipo "Open e realtime" ad alte prestazioni che utilizza lo standard hardware Ethernet utilizzato anche nei computer ma con un diverso principio di funzionamento nello scambio del pacchetto dati, che viene definito "al volo". Principio di funzionamento: EtherCat CoE utilizza il profilo CiA402 del CANopen (CoE) per lo scambio dei dati e quindi, in termini di applicazione, utenti che utilizzino già drive e periferiche in CANopen troveranno le stesse variabili e parametri utilizzate con il CanOpen. Prestazioni elevatissime, economicità della tecnologia Ethernet ed adozione del profilo CiA402 del CanOpen lo hanno reso in breve tempo il bus di campo su base ethernet più diffuso nelle apparecchiature proposte dai vari attori dell'automazione. Protocollo Cia 402: |
CANopen

CanOpenIl protocollo CanOpen, acronimo di Controller Data Network, è un fieldbus deterministico aperto "real-time" basato su hardware seriale. Protocollo Cia 402: |
ProfiNet

ProfiNetL'opzione bus di campo ProfiNet è certificata dal consorzio ufficiale PROFIBUS Nutzerorganisation e.V. ed è sviluppata nella versione RT (Real Time) e nella versione IRT (Real Time Isochronous) per classi di applicazione come AC1 - AC3 - AC4. Tutti gli azionamenti HDT dotati di questo bus di campo offrono le stesse funzionalità.HDT - Specifiche tecniche del protocollo ProfiDrive implementate: Classi di applicazione (AC):
Informazioni Tecniche su ProfiNetProfiNet (abbreviazione di Process Field Net) è un bus di campo "aperto e in tempo reale" basato sulla tecnologia Ethernet standard e conforme a IEEE802.3. adatto per la gestione dei dati industriali.ProfiNet utilizza il cosiddetto protocollo PROFIdrive per gestire l'accesso ai dati del servoazionamento, che definisce un'intera serie di parametri e dati standard.ProfiNet è sviluppato su 3 profili, distinti per campo di utilizzo, prestazioni e complessità. Il protocollo ProfiDrive è distribuito su 5 classi di applicazioni (CA). ProfiNet - Profili
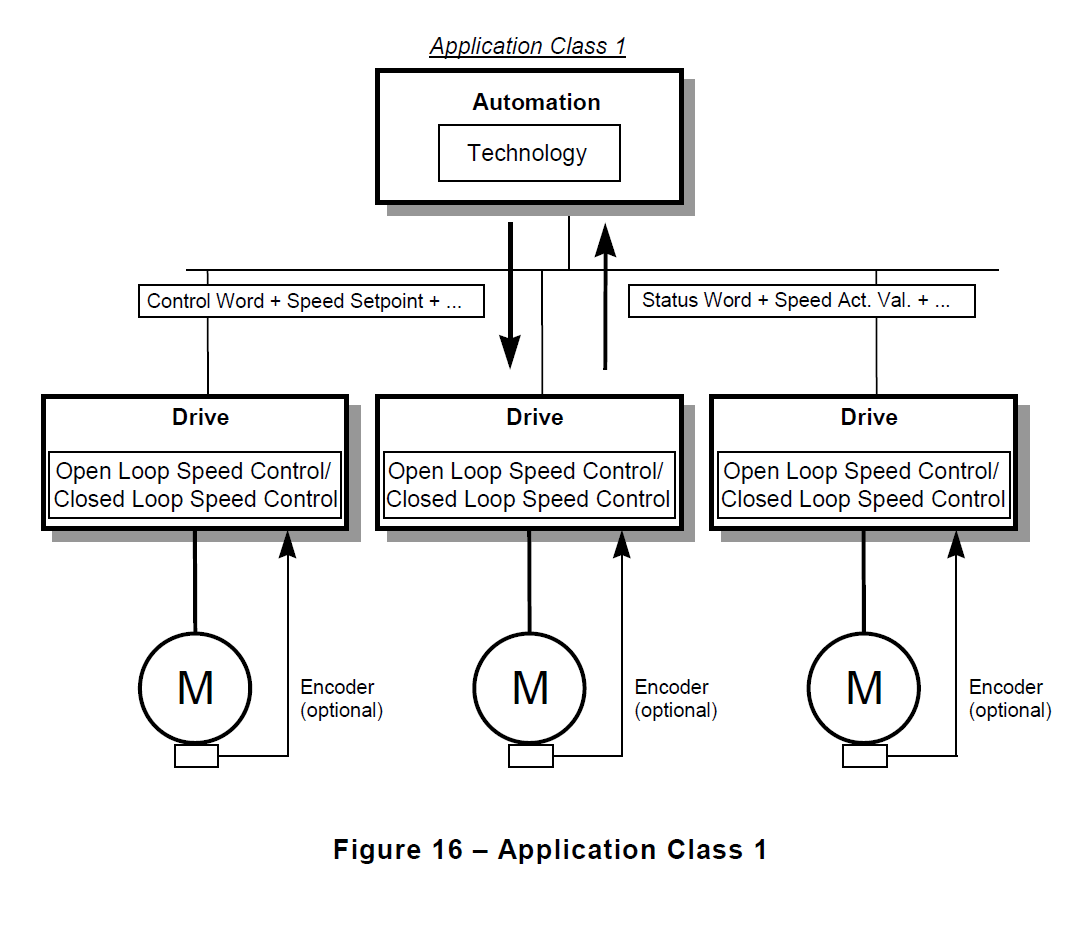
ProfiDrive - the "Application Class" AC1 - Standard Drive - speed, torque and current setpoint interface.In the simplest case, the drive is controlled via a primary setpoint (for example, speed setpoint)(see Figure 16). The speed control is governed completely in the drive controller. The PLCincludes all technological functions for the automation process. The field bus is merely thetransmission medium between the automation system and the drive controller. The Cyclic DataExchange communication service is used. This type of application is used primarily in the field ofclassical drive engineering (for example, conveyor systems). A PLC is usually used as theautomation system. Clock Synchronous Operation may be used, but is typically not necessary forthis Application Class.
AC2 - Standard Drive with distributed technology controller.Application Class 2 (has not been developped by HDT) is dedicated to implementing drive applications (seeFigure 17). In this version, the automation process is broken down into many small subprocesses.The technology functions are no longer exclusively in the central PLC, but are also distributed inthe drives. The communication interface serves as the technology interface. The data that isexchanged via the bus system between the individual automation components and drivecontrollers may be individually defined. This variant assumes, however, that communication isguaranteed in all directions; that is, DO IO Data transfer should be possible also between DriveObjects (Axis). To realise applications like setpoint cascades, winders, and speed synchronism Clock Synchronous Operation should be possible. The technology functions are realised in the drive. AC3 - Single Axis positioning drive with local Motion ControlIn Application Class 3 (see Figure 18), only the technology functions for the automation processare still in the PLC. Positioning requests are stored in the Drive. A single positioning request isstarted via a command from the Controller (e.g. PLC). Interpolation and position control as wellas speed control are implemented directly in the drive. Since in this variant, all time-criticalcontrol algorithms are hidden in the drive controller, Clock Synchronous Operation is onlynecessary if complex tracking for multiple axes shall be coordinated. AC4 - Motion Control with central interpolation and speed setpoint interfaceApplication Class 4 (see Figure 19) shows the position closed loop control closed via thecommunication system. Drives for manipulator and robotic applications often require acoordinated motion sequence of several drive systems. Motion control is primarily implementedvia a central automation unit (NC). For each drive, these controllers calculate special setpointprofiles. By coordinating several drives (for example, for the XYZ axis), certain trajectories maybe implemented. In addition to the required technology functions for the automation process, theautomation system also includes the functions for interpolation and position control of the drive.Speed setpoint values and actual values as well as the position actual value are transferred viaCyclic Data Exchange. The drive controller essentially only includes the algorithms for closedloop speed control and actual position acquisition. Since the position is controlled via the bussystem, Clock Synchronous Operation is necessary and shall be very precise. Additionally, the DSC-functionality may be used to increase the rigidity and dynamic response of the control loop. |
Modbus

ModBusProtocollo RTUIl Modbus è un protocollo di comunicazione seriale (RS485 di default, ma anche RS232) di tipo aperto creato nel 1979 per mettere in comunicazione i PLC con i dispositivi elettronici industriali. E' molto diffuso ed economico da gestire, pur non vantando grandi velocità si presta molto bene per impartire comandi con tempistiche di circa 20ms. Modbus consente la comunicazione fra diversi dispositivi connessi alla stessa rete ed è spesso usato per connettere un HMI supervisore con un'unità terminale remota (RTU) nel controllo di supervisione e sistemi di acquisizione dati (SCADA). HDT gestisce il protocollo Modbus tipo RTU molto utilizzato in automazione industriale ed il tipo TCP che è molto simile al Modbus RTU, ma trasmette i pacchetti del protocollo dentro pacchetti di dati di tipo TCP/IP. |



*in sviluppo
CPU.
32Bit di leggerezza.
TomCat460 Evo impiega nuovi processori con architettura a 32-Bit con capacità di calcolo in FPU a 32-Bit che abbinati ad una programmazione snella e leggera del suo firmware lo rendono Evo estremamente reattivo e performante.
Frequenza di PWM standard a 10kHz selezionabile a piacimento tra un range di 2kHz fino a 20kHz.
La banda passate a 1600Hz garantisce elevate prestazioni di controllo. Mettilo alla prova.
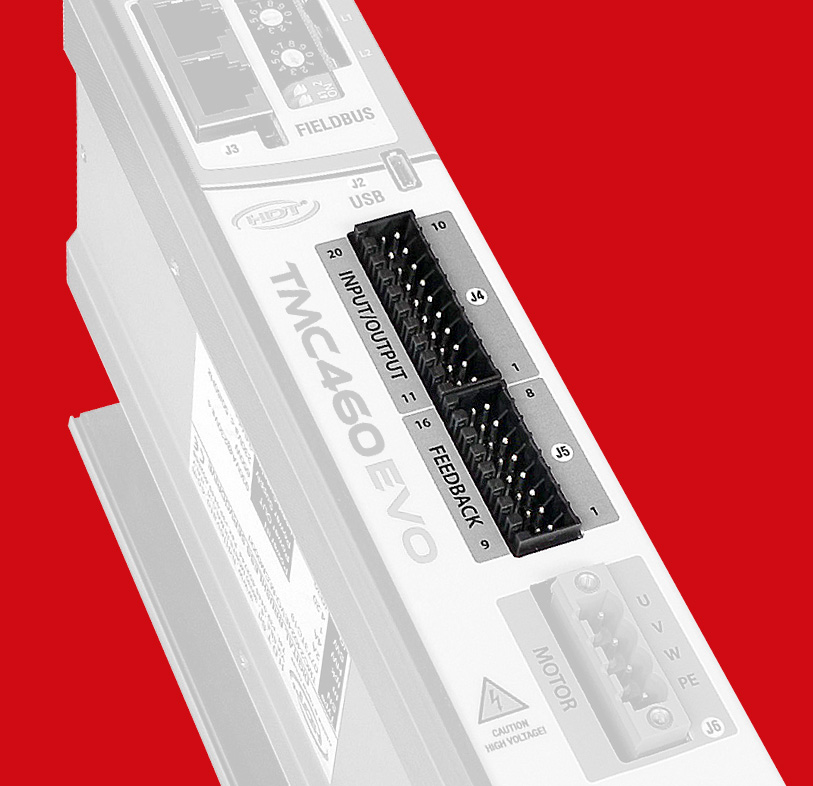
Ingressi e uscite.
Analogiche.
1 ingresso analogico differenziale a 12 Bit principale.
1 ingresso analogico differenziale a 12 Bit secondario.
Digitali.
6 ingressi PNP/NPN programmabili optoisolati.
3 uscite PNP/NPN programmabili optoisolate.
1 ingresso in frequenza optoisolato.
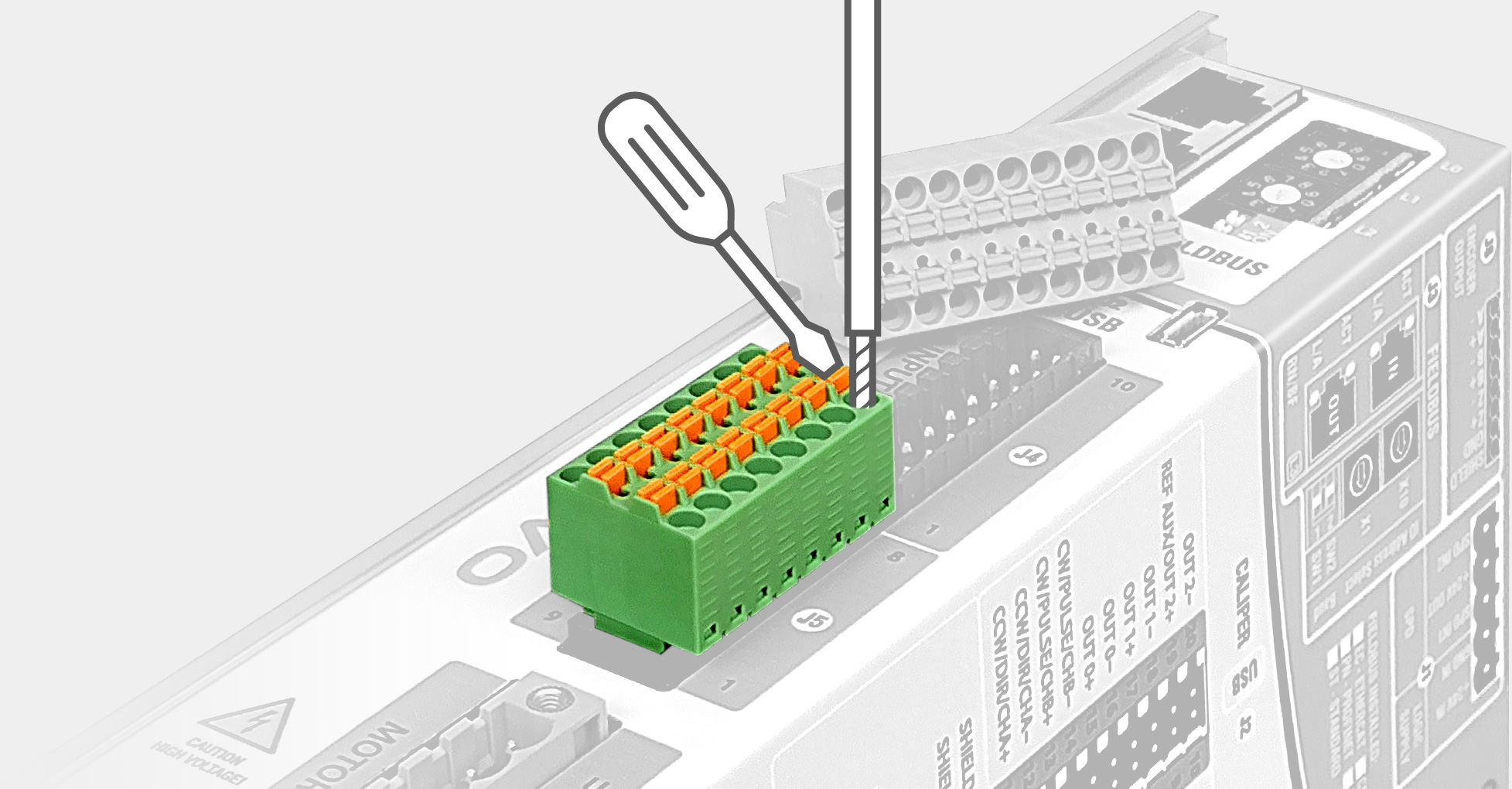
Cablaggio Semplificato
Basta con connettori da stagnare o da avvitare!
Nuovi connettori per I/O con innesto a molla.
Superiore tenuta alle vibrazioni rispetto al fissaggio a vite.
Più semplici da cablare di un connettore a stagnare.
Perchè il tuo tempo vale.
Sicurezza STO.
Integrata e certificata.
TomCat460 EVO integra la funzione di sicurezza Safe Torque-Off (STO) è realizzato e certificato da TUV in conformità alla norma IEC EN 61800-5-2, con arresto in categoria 0, e con riferimento alla norma IEC61508 per il livello SIL3.
Questo consente di eliminare il teleruttore a monte dell'azionamento garantendo la massima sicurezza possibile.
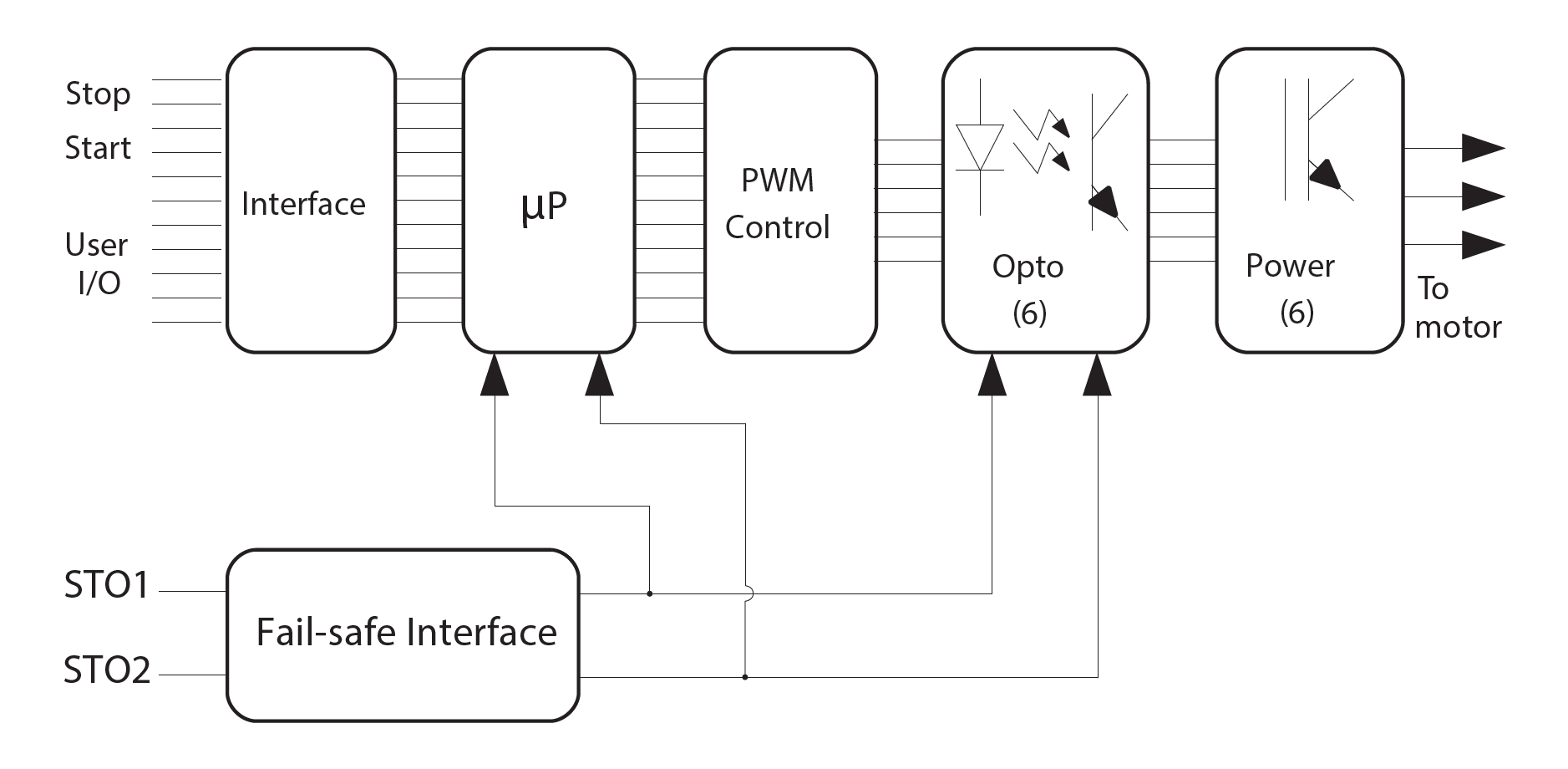
STO
La funzione Safe Torque-Off (STO) del drive TomCat è costituita da un circuito elettrico ridondante progettato per portare un azionamento ad uno stato di sicura assenza di coppia.
E' una funzione utilizzata per prevenire la rotazione inattesa del motore in caso di emergenza senza l'obbligo di sezionare l'alimentazione di potenza. Quando la funzione STO è attivata, il servodrive ed il motore sono in uno stato di sicurezza funzionale ovvero vi è impossibilità di produrre una rotazione attiva dell’albero motore o se in moto si arresta per inerzia.
Il circuito di sicurezza implementato nel drive è realizzato e certificato in conformità alla norma IEC EN 61800-5-2, con arresto in categoria 0, e con riferimento alla norma IEC61508 per il livello SIL3. La categoria di arresto 0 è conseguita con lo scollegamento immediato dei componenti elettronici (IGBT) responsabili della energizzazione del sistema, che determina un arresto non controllato dell'asse, per inerzia.
Vantaggi
E' consuetudine nelle applicazioni ove non è presente un drive equipaggiato con STO, mettere in sicurezza il sistema sezionando la potenza tramite un teleruttore di adeguata portata.
Utilizzando lo STO è possibile eliminare il teleruttore con un beneficio economico, con un risparmio di spazio nel quadro ed ottenendo un livello di integrità di sicurezza maggiore.
DC Bus.
Un altro modo per fare green.
Unico nella sua dimensione a disporre del Bus in DC per poter scambiare con altri drive l'energia generata dal motore in fase di rallentamento.
L'energia non viene più dispersa su una resistenza di frenatura ma riutilizzata dal sistema a vantaggio dell'ambiente e del risparmio energetico.
Una soluzione semplice per essere ancora più green.
USB 2.0
La comodità si fa strada.
TomCat comunica con il PC attraverso la porta micro USB di tipo 2.0.
L'abbiamo scelta perchè veloce, ma sopratutto perchè comoda.
Basta con complicati convertitori seriali, ora per connetterti a Caliper, il nostro tool di parametrizzazione, basta un semplice cavetto USB ed il gioco è fatto.
Caliper.
Caliper, l'interfaccia PC. Caliper è lo strumento software d'interfaccia tra PC basati su sistemi operativi Microsoft Windows e tutti i servoazionamenti HDT. Progettato per rendere facile ed intuiditva la calibrazione del vostro servodrive e del vostro motore.
Applicativi.
TomCat460 Evo dispone di varie modalità operative di lavoro e numerosi applicativi attivabili dal software. Applicativi che possono essere utilizzati sia quando si lavora tramite i riferimenti analogici sia con i bus di campo.
Asse Elettrico, Camma Elettronica, Multiposizionatore, Controllo di Coppia e di Velocità con o senza limite di coppia sono solo alcuni degli applicativi disponibili di serie tra le funzionalità attivabili dal software.
