



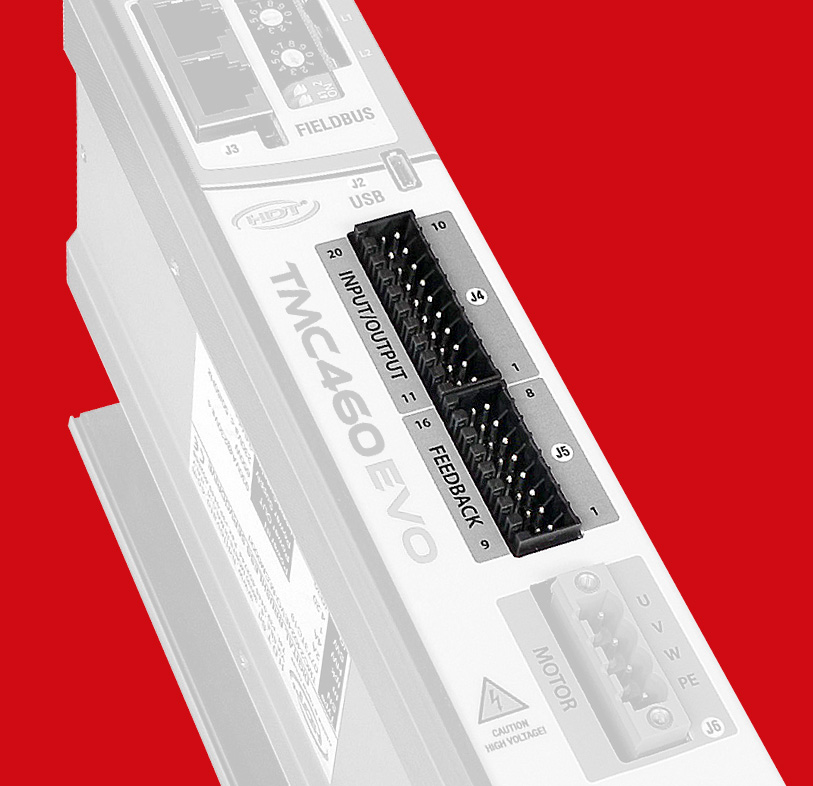
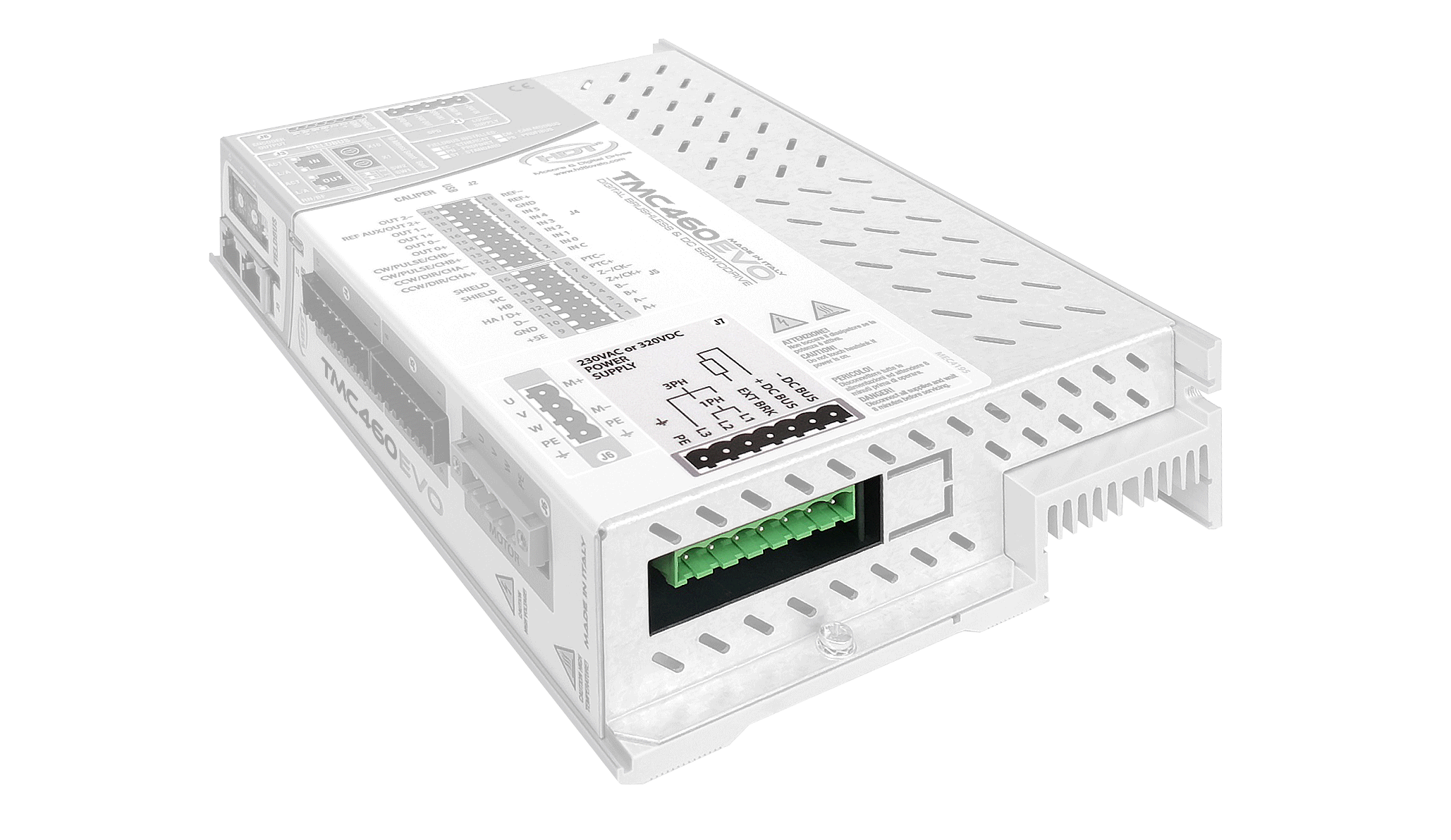
TomCat460 Evo
TomCat.The evolution of the species.
...now also at 400VAC

Redesigned in a big way.
New 32Bit processor. |
|
| 32-Bit latest generation processor with 32-Bit FPU computing capability. Standard PWM frequency of 10kHz selectable from 2kHz up to 20kHz and a pass band of 1600Hz. |
|
Optimized firmware. |
|
| More responsive and performing thanks to the redesigned firmware to be lean and light. Standard applications for complex positioning, management of electric axes, electronic cams or simply for torque and speed control. Dedicated to those looking for economy without sacrificing performance. |
|
All-around connectivity. |
|
| New field buses to adapt to a wide variety of situations. From the timeless CANopen to the ever-versatile Modbus, the powerful EtherCAT CoE is added and not least the prevailing ProfiNet to seize the opportunities to work with the Siemens world TomCat knows no limits. |
|
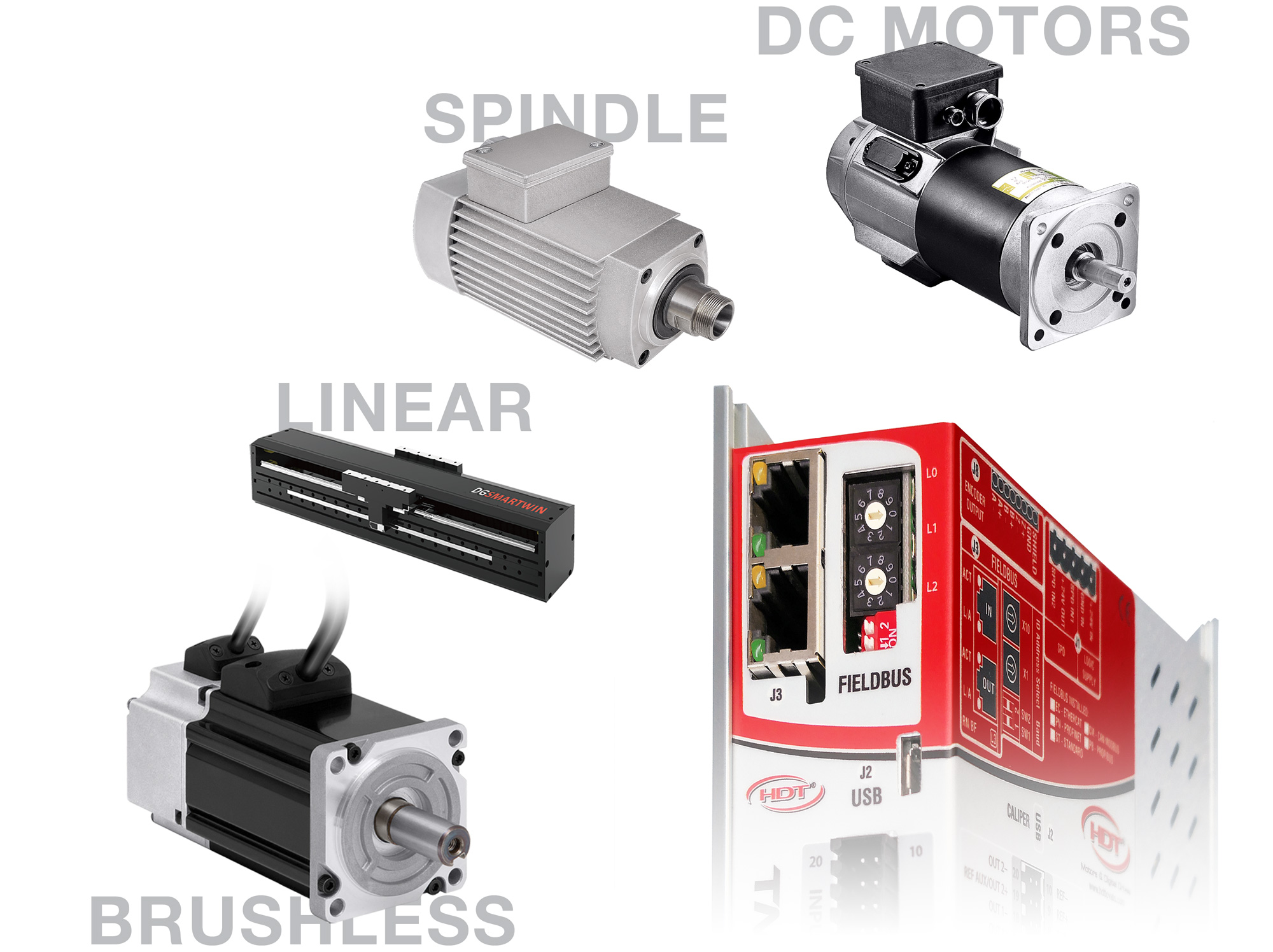
Motor control: no longer just brushless. |
|
| A single servodrive to manage any type of motor. Rotary brushless, linear brushless, asynchronous, spindle, direct current with permanent magnets. The flexibility you were looking for. |
|
Resolver. The option that was missing. |
|
| In addition to reading Incremental Encoders with Hall sensors or SSI Absolute Encoders, we have added the option for reading the Resolver with a resolution of 16Bit.The precision and robustness necessary for harsh working environments. The precision and robustness necessary for harsh working environments. |
|
DC Bus. When environment and savings go hand in hand. |
|
| TomCat adds the DC Bus to be able to transfer the energy generated during the slowdown from one drive to the other instead of dispersing it in the environment through the braking resistor. Simple and economic solution for energy saving and environmental protection. |
|
USB 2.0. Comfort makes its way. |
|
| Type 2.0 USB port. We chose it because it is fast, but above all because it is comfortable.Enough with serial or USB/Serial converters that drive you crazy. Now to connect to Caliper, our parameterization tool, you just need a simple cable and you're done. Long live simplicity. |
|
Motor control.
Not just brushless.
TomCat460 Evo is able to indifferently control synchronous (brushless) rotary and linear motors, permanent magnet direct current motors equipped with encoders but also asynchronous/spindle motors in V/F (Volt/Hertz) or FOC (Vector) control with frequencies up to 1200Hz.This will allow you to manage the axes for positioning or interpolation but also to manage any asynchronous spindles for drilling, milling or other high-speed applications.
A truly unique drive with incredible flexibility.
Feedbacks.
Incremental Encoder.
A main input for reading Incremental Encoders with or without Hall sensors. 5V line drive signal, push-pull or Open Collector. Specific output dedicated to the repetition of the encoder signal.
Absolute Encoder SSI.
The same main input can be used for reading absolute digital encoder : SSI (Bin), BiSS, EnDat with resolution up to 32Bit/turn and 16Bit/multit.
External Encoder.
A second input is dedicated to reading an external auxiliary incremental encoder, rotative or linear, positioned on the application.
Resolver option.
The same input can be enabled for Resolver reading with 16Bit resolution.
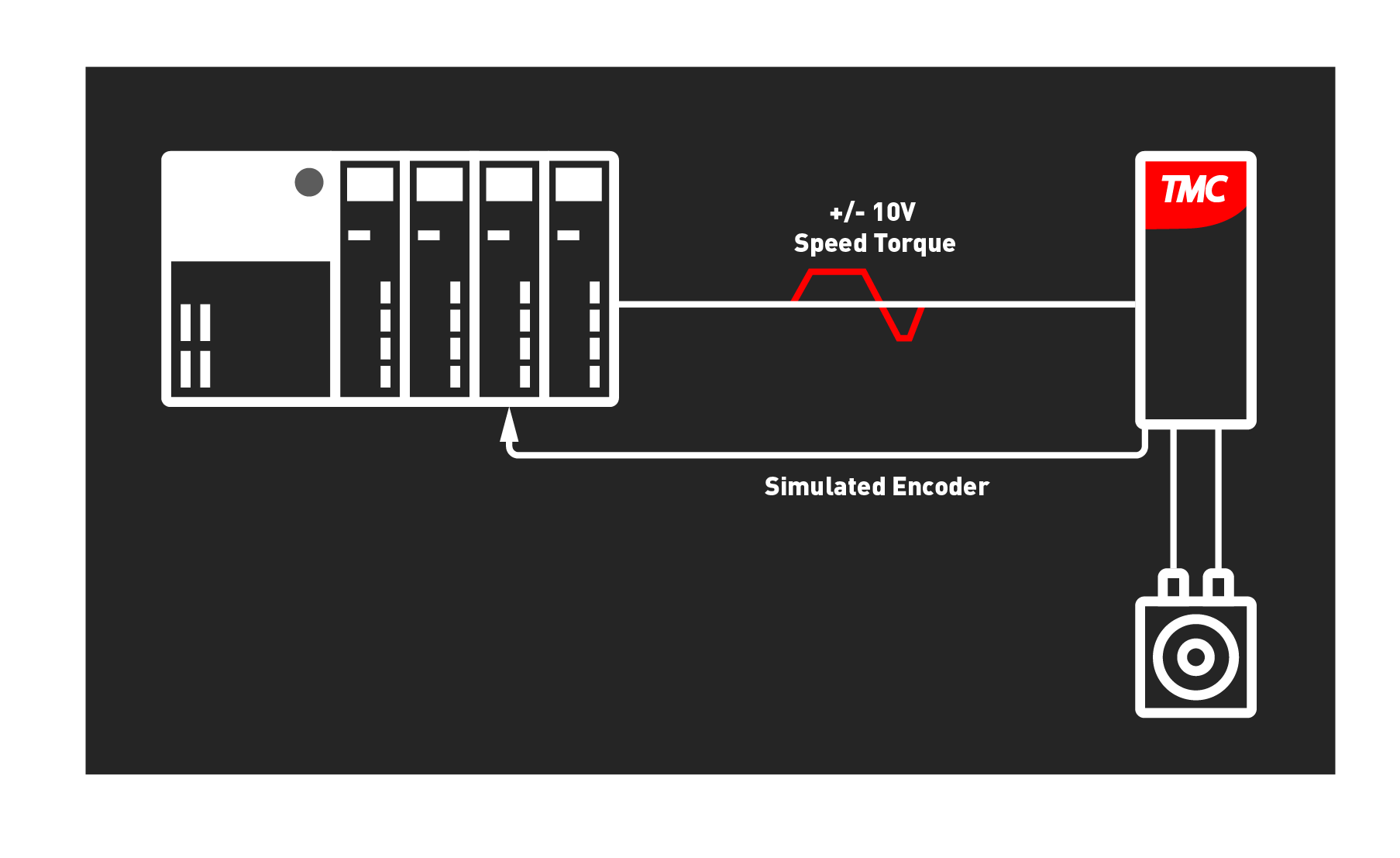
Specific output dedicated to encoder simulation.
Analog References.
In line with tradition.
For traditional motion control through the analog signal +/- 10V and 0 / 10V, TomCat460 Evo is equipped with two 12Bit inputs. An input dedicated to the main speed or torque reference or for reading the pressure transducer.
A second input dedicated to a secondary speed or torque limit or position reference.
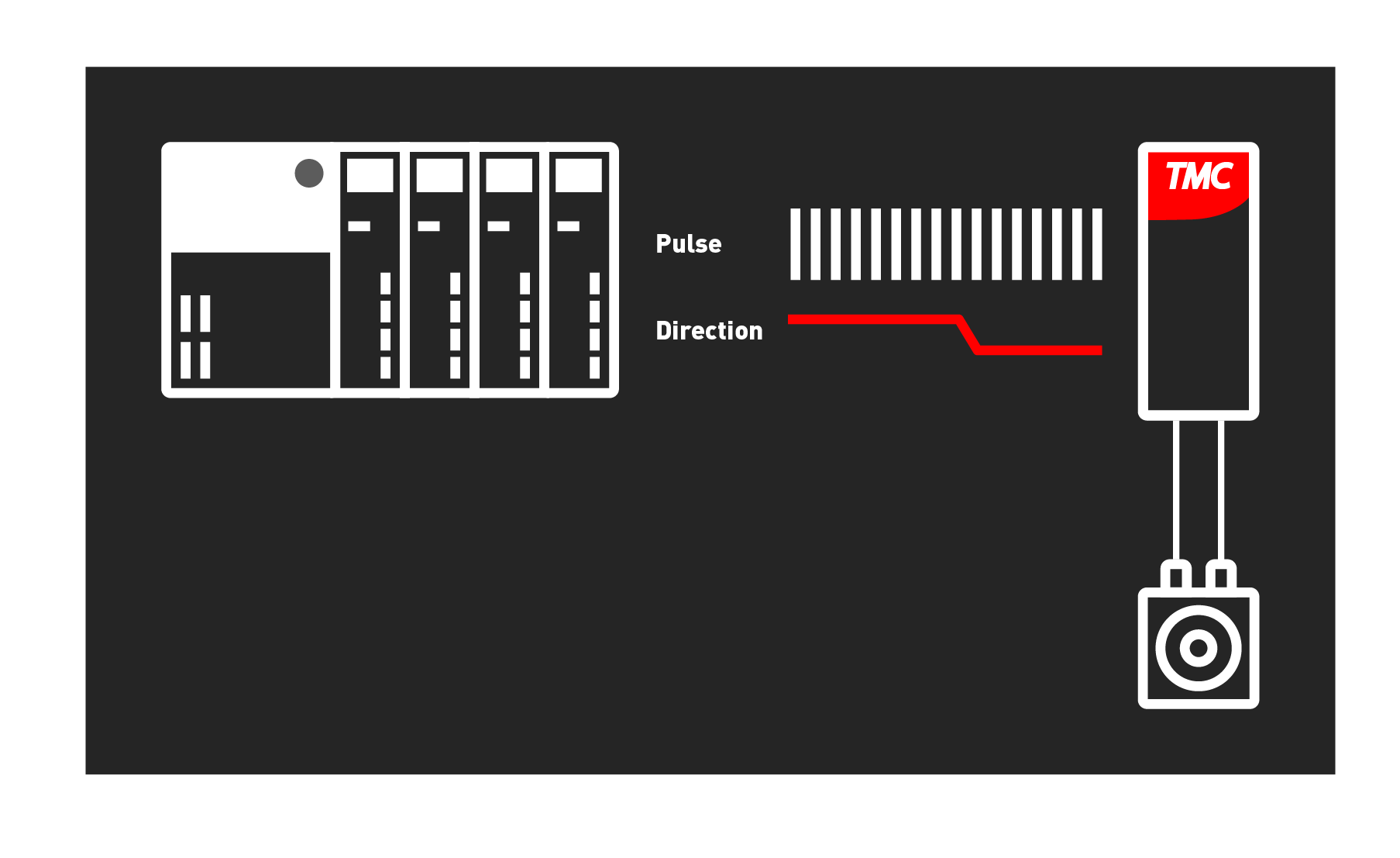
Frequency references.
Most loved by PLC users.
For PLC control through frequency and direction control or in CW/CCW frequency, TomCat460 Evo has two inputs that receive up to 2MHz per channel.
The same input also manages any feedback from an external A/B incremental encoder.
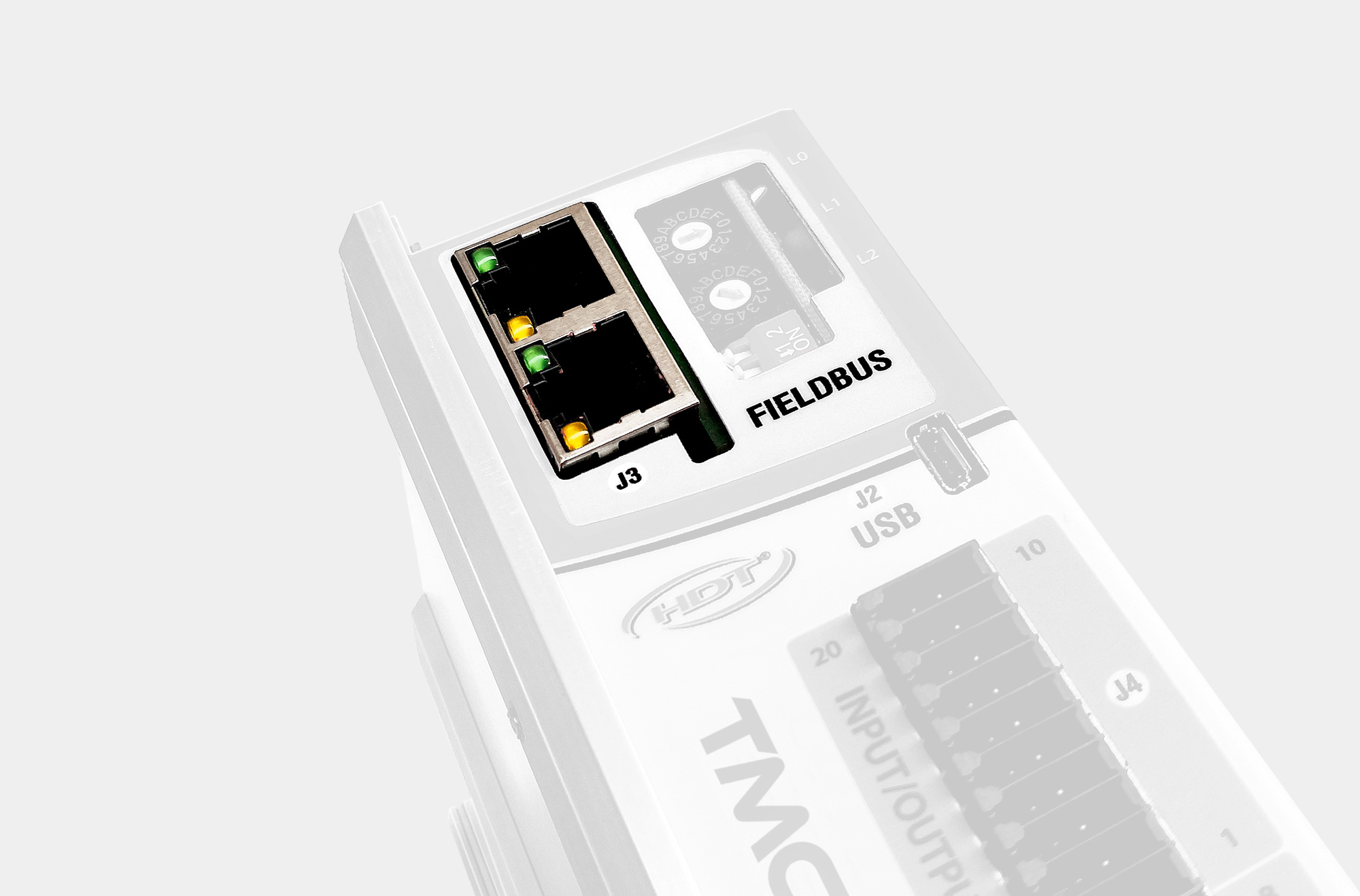
Fieldbus.
Graduated in languages.
With new field buses TomCat240 Evo widens the possibilities of interaction with the world of the most advanced PLC and NC.
EtherCAT CoE the most powerful and versatile real-time protocol for Motion applications with very fast interpolations.
ProfiNet RT/IRT the real-time protocol for dialogue with the most important PLCs and CNCs on the market.
EtherNet/IP the Ethernet-based protocol (IEEE 802.3) for industrial automation applications..
CANopen Cia402, the flexibility and economy of an open protocol.
Modbus RTU the robustness of a serial protocol for positioning.
He only misses the word
Ethercat
EtherCATCiA 402 ProtocolThe EtherCAT CoE protocol is a standard for data exchange in industrial automation, in jargon a high-performance "Open and realtime" fieldbus that uses the Ethernet hardware standard also used in computers but with a different operating principle in the exchange of the data packet, which is called "on the fly". Principle of operation: EtherCat CoE uses the CiA402 profile of CANopen (CoE) for data exchange and therefore, in terms of application, users who already use drives and peripherals in CANopen will find the same variables and parameters used with CanOpen. Very high performance, low cost of Ethernet technology and adoption of the CiA402 profile of CanOpen have made it in a short time the fieldbus on an ethernet basis, most widespread in the equipment proposed by the various automation actors. Protocol Cia 402: |
Canopen

CanopenThe CanOpen protocol, which stands for Controller Data Network, is a real-time open deterministic fieldbus based on serial hardware. Protocol Cia 402: |
Profinet

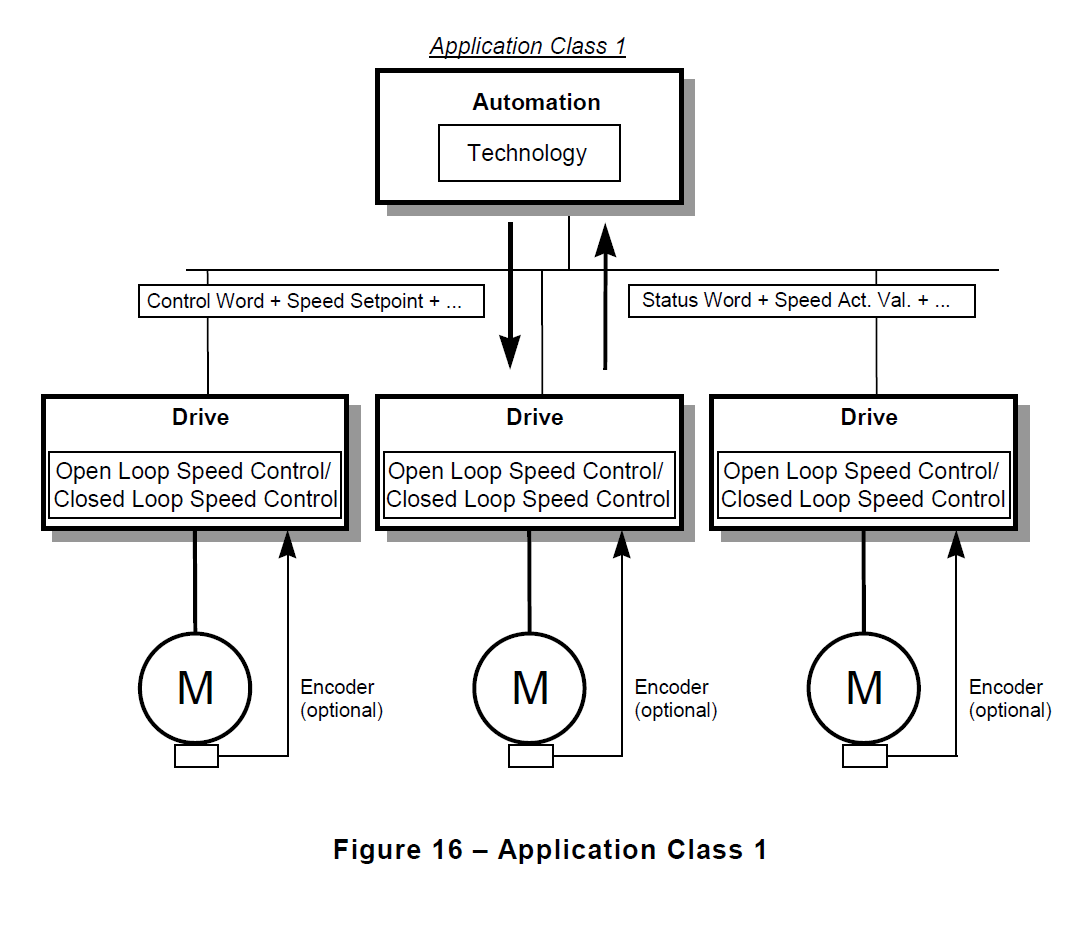
ProfiNetThe ProfiNet fieldbus option is developed in the RT (Real Time) version and in the IRT (Real Time Isochronous) version for application classes such as AC1 - AC3 - AC4.All HDT drives equipped with this fieldbus offer the same functionality. HDT - Technical specifications of the ProfiDrive protocol implemented: Application classes (AC): Technical information on ProfiNetProfiNet (short for Process Field Net) is an "Open and real-time" fieldbus based on standard Ethernet technology and compliant with IEEE802.3. suitable for industrial data management. ProfiNet - Profiles - ProfiNet TCP/IP ( No Real-time),non-deterministic profile for applications where timing is not critical which uses the standard TCP / IP and UDP / IP protocols used for parameterizations, configurations and acyclic read / write operations with which cycle times> 100 ms are achieved. ProfiDrive - the "Application Class" AC1 - Standard Drive - speed, torque and current setpoint interface.In the simplest case, the drive is controlled via a primary setpoint (for example, speed setpoint)(see Figure 16). The speed control is governed completely in the drive controller. The PLCincludes all technological functions for the automation process. The field bus is merely thetransmission medium between the automation system and the drive controller. The Cyclic DataExchange communication service is used. This type of application is used primarily in the field ofclassical drive engineering (for example, conveyor systems). A PLC is usually used as theautomation system. Clock Synchronous Operation may be used, but is typically not necessary forthis Application Class.
AC2 - Standard Drive with distributed technology controller.Application Class 2 (has not been developped by HDT) is dedicated to implementing drive applications (seeFigure 17). In this version, the automation process is broken down into many small subprocesses.The technology functions are no longer exclusively in the central PLC, but are also distributed inthe drives. The communication interface serves as the technology interface. The data that isexchanged via the bus system between the individual automation components and drivecontrollers may be individually defined. This variant assumes, however, that communication isguaranteed in all directions; that is, DO IO Data transfer should be possible also between DriveObjects (Axis). To realise applications like setpoint cascades, winders, and speed synchronism Clock Synchronous Operation should be possible. The technology functions are realised in the drive. AC3 - Single Axis positioning drive with local Motion ControlIn Application Class 3 (see Figure 18), only the technology functions for the automation processare still in the PLC. Positioning requests are stored in the Drive. A single positioning request isstarted via a command from the Controller (e.g. PLC). Interpolation and position control as wellas speed control are implemented directly in the drive. Since in this variant, all time-criticalcontrol algorithms are hidden in the drive controller, Clock Synchronous Operation is onlynecessary if complex tracking for multiple axes shall be coordinated. AC4 - Motion Control with central interpolation and speed setpoint interfaceApplication Class 4 (see Figure 19) shows the position closed loop control closed via thecommunication system. Drives for manipulator and robotic applications often require acoordinated motion sequence of several drive systems. Motion control is primarily implementedvia a central automation unit (NC). For each drive, these controllers calculate special setpointprofiles. By coordinating several drives (for example, for the XYZ axis), certain trajectories maybe implemented. In addition to the required technology functions for the automation process, theautomation system also includes the functions for interpolation and position control of the drive.Speed setpoint values and actual values as well as the position actual value are transferred viaCyclic Data Exchange. The drive controller essentially only includes the algorithms for closedloop speed control and actual position acquisition. Since the position is controlled via the bussystem, Clock Synchronous Operation is necessary and shall be very precise. Additionally, the DSC-functionality may be used to increase the rigidity and dynamic response of the control loop. |
Modbus

ModbusRTU protocolModbus is an open type serial communication protocol (RS485, but also RS232) created in 1979 to put PLCs in communication with industrial electronic devices. It is very popular and inexpensive to manage, although it does not boast great speeds, it lends itself very well to impart commands with a timing of about 20ms. Modbus allows communication between different devices connected to the same network and is often used to connect a supervisor HMI with a remote terminal unit (RTU) in supervision control and data acquisition systems (SCADA). HDT manages the Modbus RTU type protocol widely used in industrial automation and the TCP type which is very similar to Modbus RTU, but transmits the protocol packets within TCP/IP type data packets. |



*under development
CPU.
32Bit of lightness.
TomCat460 Evo uses new 32-Bit architecture processors with computational capacity in 32-Bit FPU which combined with a lean and light programming of its firmware make it Evo extremely responsive and performing.
Standard PWM frequency at 10kHz selectable at will from a range of 2kHz up to 20kHz.
The 1600Hz pass band ensures high control performance.
Put it to the test.
Input and output.
Analog.
1 main 12 Bit differential analog input.
1 secondary 12 Bit differential analog input.
Digitals.
6 programmable optoisolated PNP / NPN inputs.
3 programmable optoisolated PNP / NPN outputs.
1 optically isolated frequency input.
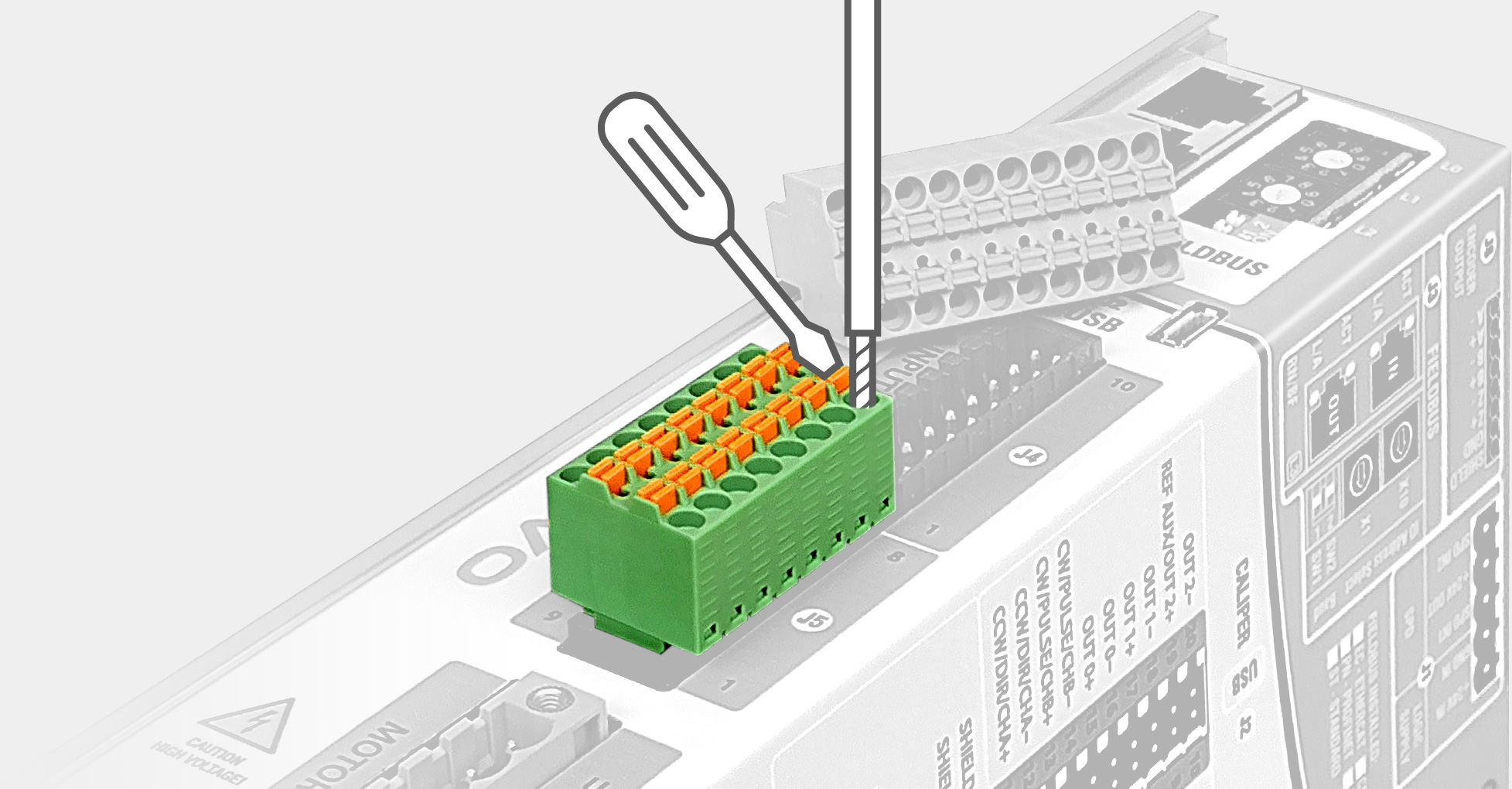
Simplified wiring
Enough with connectors to be soldered or screwed!
New I / O connectors with spring connection.
Superior resistance to vibrations compared to screw fixing.
Easier to wire than a tin connector.
Becouse your time is precious.
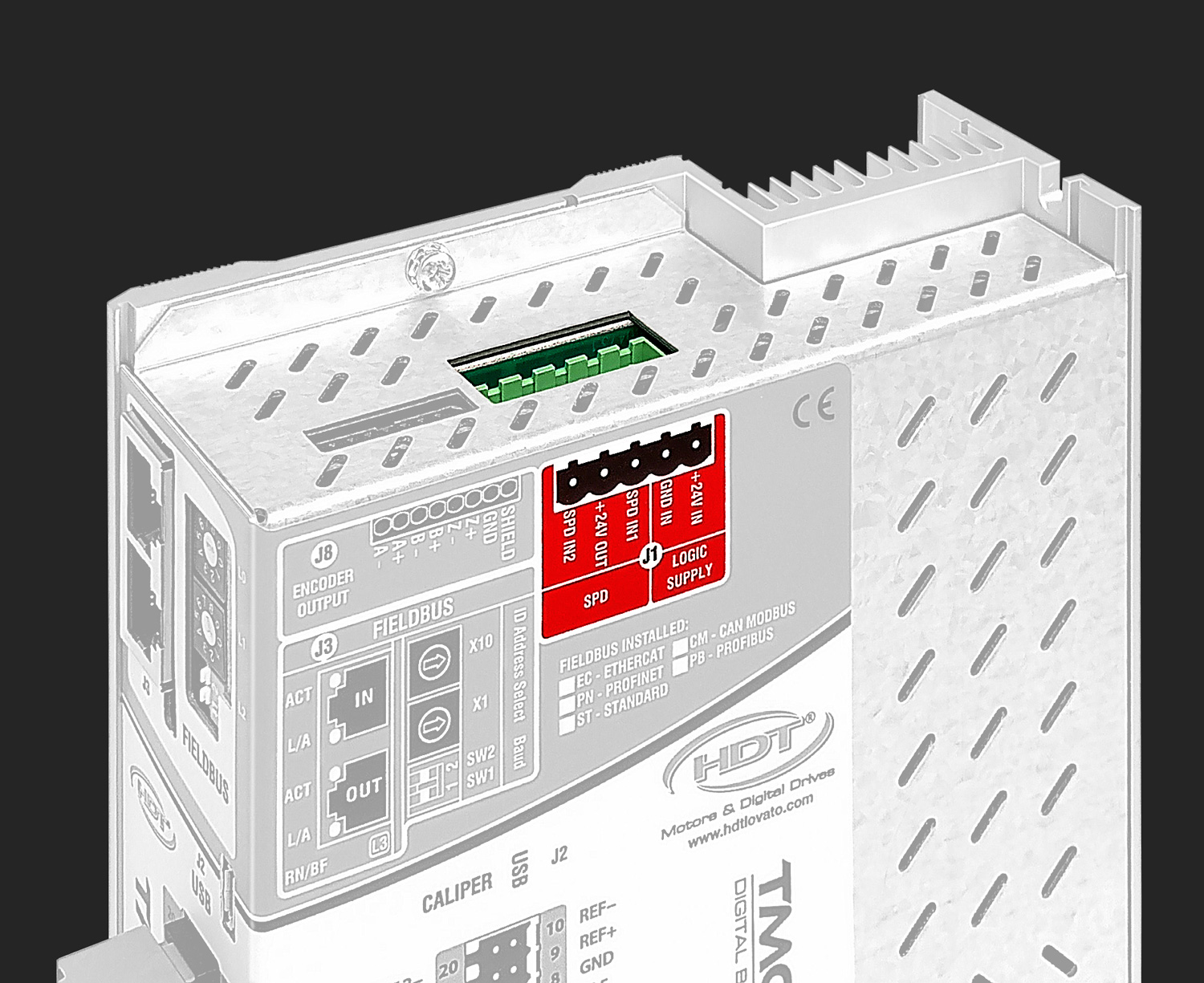
STO Safety.
Integrated and certified.
TomCat460 EVO integrates the Safe Torque-Off (STO) safety function is manufactured and certified by TUV in accordance with IEC EN 61800-5-2, with stop in category 0, and with reference to IEC61508 for SIL3 level.
This makes it possible to eliminate the contactor upstream of the drive, guaranteeing the maximum possible safety.
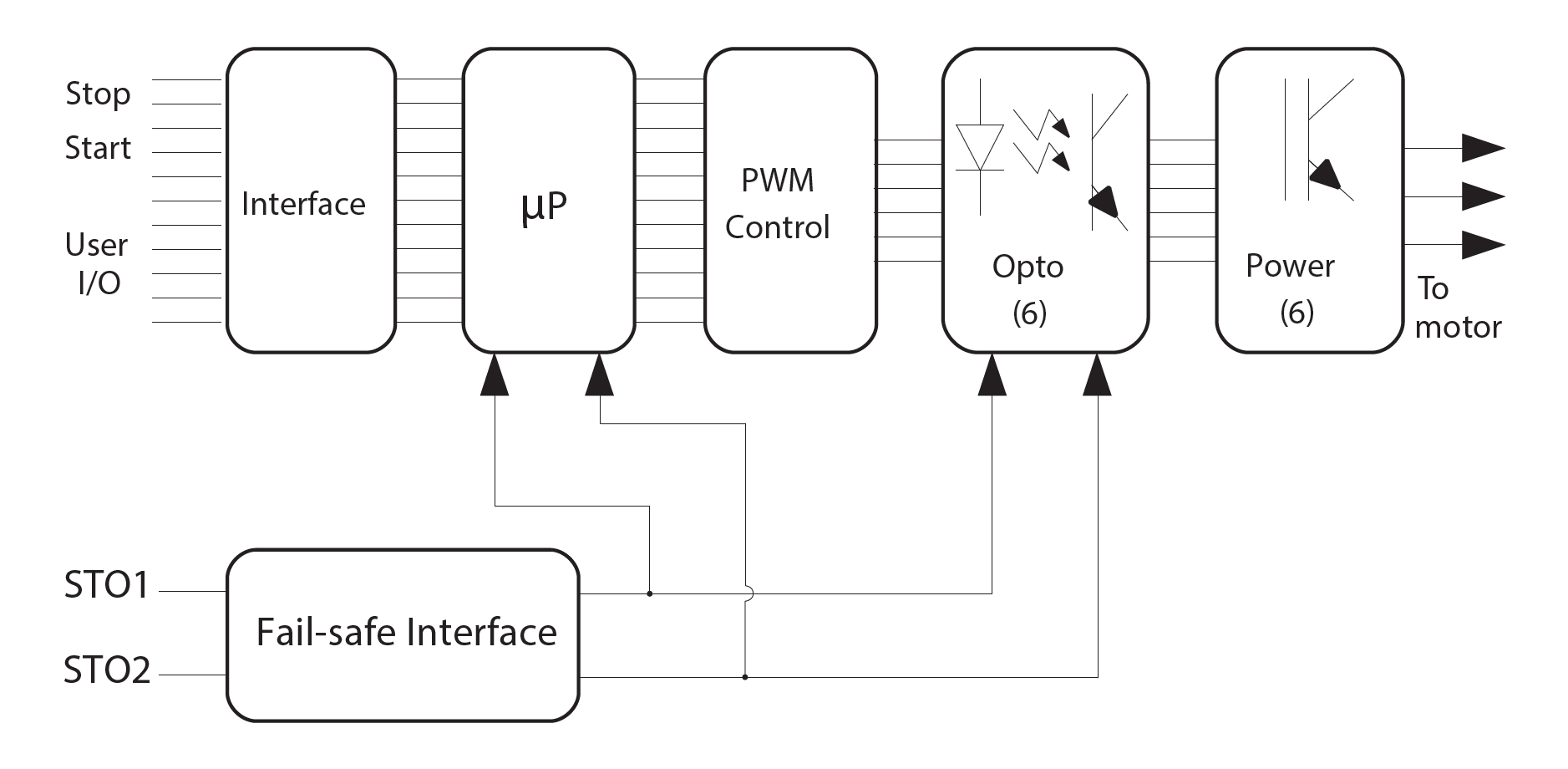
STO
The Safe Torque-Off (STO) function of the TomCat drive consists of a redundant electrical circuit designed to bring a drive to a state of safe torque absence.
It is a function used to prevent unexpected rotation of the motor in an emergency without the obligation to disconnect the power supply. When the STO function is activated, the servodrive and the motor are in a state of functional safety or there is an impossibility of producing an active rotation of the motor shaft or if in motion it stops by inertia.
The safety circuit implemented in the drive is manufactured and certified in accordance with the IEC EN 61800-5-2 standard, with stop in category 0, and with reference to the IEC61508 standard for the SIL3 level. Stop category 0 is achieved with the immediate disconnection of the electronic components (IGBT) responsible for energizing the system, which causes an uncontrolled stop of the axis by inertia.
Advantages
It is customary in applications where there is no drive equipped with STO, to make the system safe by cutting the power by means of a suitable capacity contactor switch. Using the STO it is possible to eliminate the contactor with an economic benefit, with a saving of space in the electrical cabinet and obtaining a higher level of safety integrity.
DC Bus.
Another way to be green.
Unique in its size to have the DC Bus in order to exchange the energy generated by the motor during the slowdown phase with other drives.
Energy is no longer dispersed on a braking resistor but reused by the system for the benefit of the environment and energy savings.
A simple solution to be even greener.
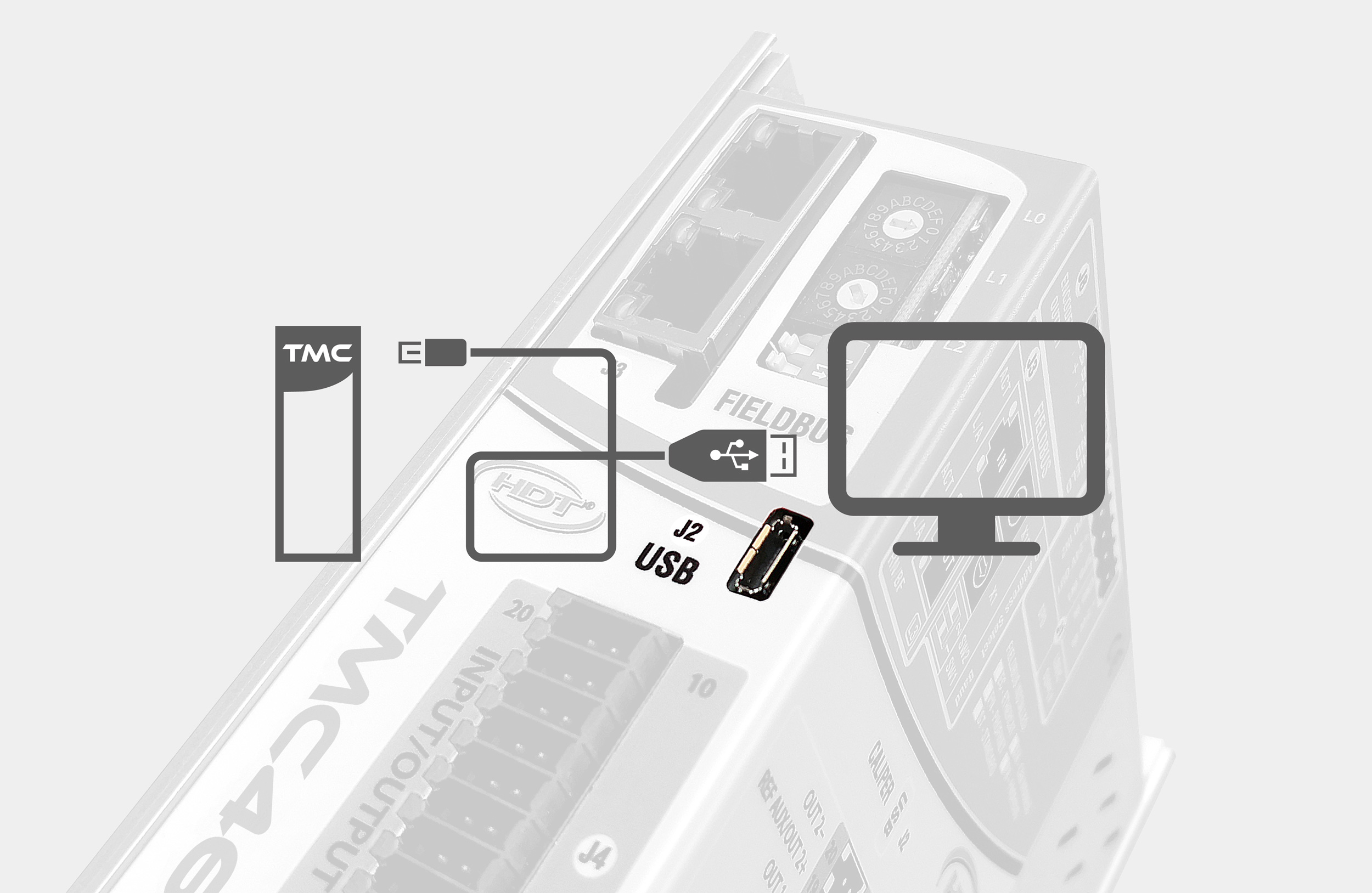
USB 2.0
Comfort makes its way.
TomCat communicates with the PC through the micro USB 2.0 type port.
We chose it because it is fast, but above all because it is comfortable.
Enough with complicated serial converters, now to connect to Caliper, our parameterization tool, just a simple USB cable and you're done.
Caliper.
Caliper, the PC interface. Caliper is the software interface tool between PCs based on Microsoft Windows operating systems and all HDT servo drives. Designed to make the calibration of your servodrive and your motor easy and intuitive.
Applicatives.
TomCat240 Evo has various working operating modes and numerous applications that can be activated by the software. Applications that can be used both when working through analog references and with field buses.
Electric Axis, Electronic Cam, Multi-positioner, Torque and Speed Control with or without torque limit are just some of the applications available as standard among the functions that can be activated by the software.
