DGFox 60 EVO

Descrizione
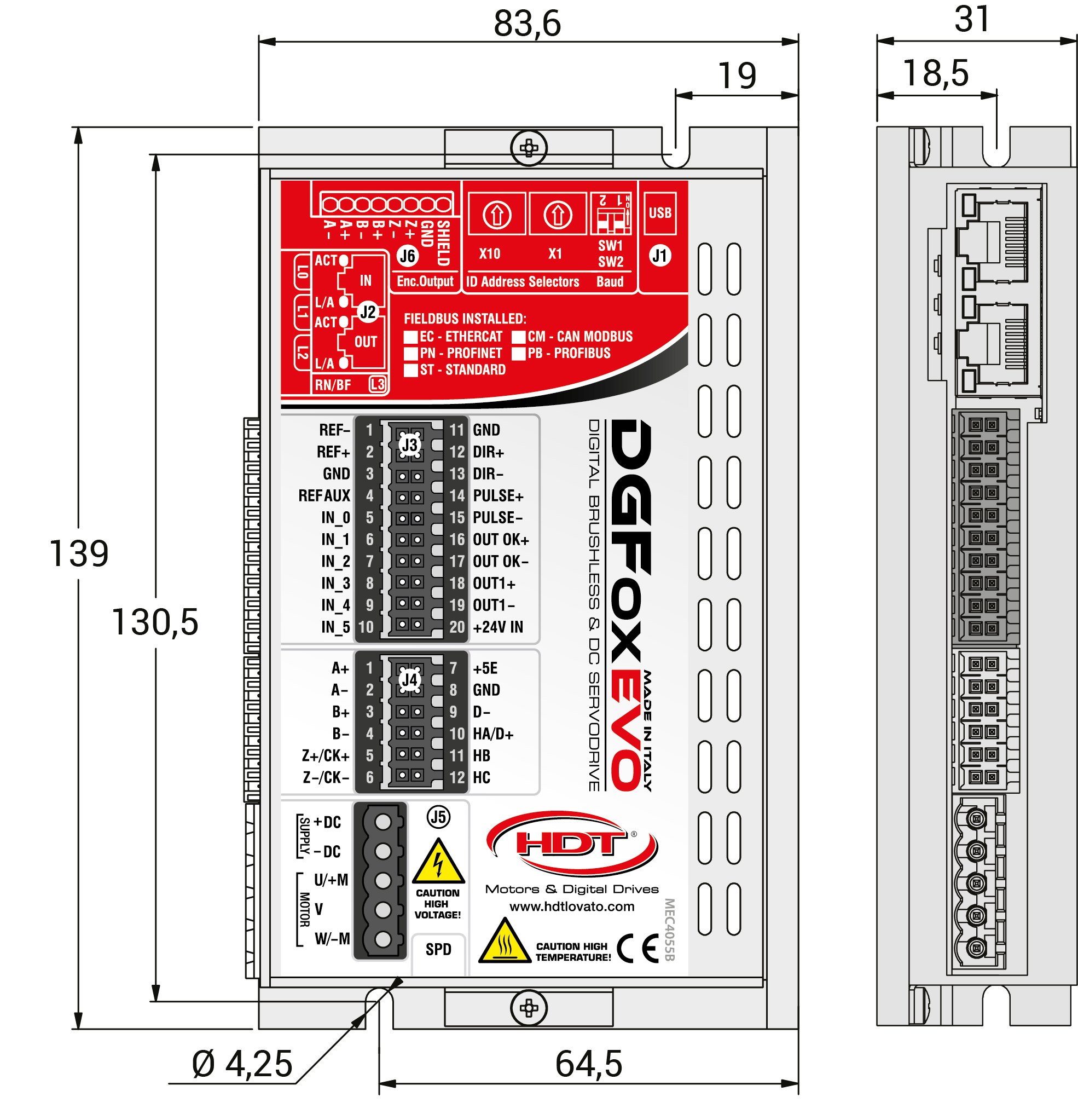
DGFox60 Evo® di HDT è un servoazionamento digitale digitali sinusoidale in esecuzione monoasse per il funzionamento da alimentazione in corrente continua a bassa tensione, da 20 a 80VDC. Taglie in corrente fino a 13A corrispondenti a potenze nominali fino a 900W.
DGFox60 Evo® permette il controllo motore di servomotori brushless rotativi e lineari, e in corrente continua a magneti permanenti dotati di encoder.
Pilotaggio sia dal riferimento analogico che da protocollo EtherCat, ProfiNet, CanOpen e Modbus.
Feedback da encoder incrementali, encoder assoluti SSI.
DGFox60 Evo® integra di serie il controllo di velocità, di coppia, il posizionatore, l'asse elettrico, la camma elettronica ed il controllo di pressione.
Facili da programmare si collegano tramite la porta USB al veloce software di gestione Caliper.
Specifiche Tecniche
Metodi di controllo |
||
| Anelli di regolazione di coppia, velocità e posizione digitali. |
- motore sincrono AC brushless rotativo e lineare: controllo FOC, modulazione SVM, con feedback o sensorless. |
|
Riferimento principale |
||
| Analogico |
±10V differenziali velocità e coppia 12Bit |
|
Riferimento ausiliario |
||
| Analogico |
0/+10V single ended - 12Bit |
|
Riferimento in frequenza |
||
|
Velocità e posizione |
- Impulsi e direzione ( 2MHz ) |
|
Bus di campo opzionali |
||
|
- Modbus RTU |
||
Retroazione principale |
||
|
Sensori di Halls |
- Sensori di Hall con sequenza a 120° |
|
|
Encoder 5V |
- Enc. Incrementale 5V Line Drive con/senza sensori di Halls |
|
Uscita encoder |
||
| Ripetizione |
- Ripetizione canali ABZ della retroazione principale |
|
Modalità di controllo |
||
|
Velocità |
- Velocità con/senza limite di coppia.Rampe regolabili trapezoidali o ad "S" |
|
| Coppia |
- Controllo di coppia |
|
| Posizione |
- Multiposizionatore: Singola quota, Tabella ciclica/aciclica, da ingresso analogico |
|
Ingressi e uscite configurabili |
||
|
Ingressi |
- 6 ingressi digitali NPN/PNP programmabili (2 Touch Probe) |
|
| Uscite |
- 2 uscite digitali NPN/PNP programmabili |
|
Filtri digitali |
||
|
- Observer sulla retroazione da motore per riduzione rumore. |
||
Protezione drive e motore |
||
|
- Cortocircuito motore |
||
Interfaccia drive |
||
|
- 3 LED sul drive per segnalazione stato e allarmi. Informazioni complete via Bus di campo. |
||
Gestione frenatura |
||
|
- Gestione del freno integrata con arresto immediato o in rampa |
||
Parametrizzazione Drive |
||
|
- Tramite software CALIPER 4.0 attraverso la porta microUSB 2.0 |
||
Funzionalità aggiuntive |
||
|
- Procedura di autofasatura del motore disponibile per ogni tipologia di feedback. |
||
Taglie in corrente
| Taglie in corrente | U.m. | 2.5 | 5 | 8 |
10 | 13 |
| Tensione di alimentazione | VDC | 60VDC |
||||
| Tensione d'alimentazione Min/Max | VDC | 20÷80 VDC |
||||
| Corrente nominale | Arms | 2.5 | 5 | 8 |
10 | 13 |
| Corrente di picco per 2” | Arms | 5 | 10 | 16 |
20 | 26 |
| Potenza d’uscita nominale | KW | 0.175 | 0,35 | 0,55 |
0,70 |
0,90 |
| Alimentazione di back-up della logica | VDC | 24VDC ± 20% | ||||
| Resistenza interna di frenatura interna | NO | |||||
| Dimensioni | T0 | |||||
| Peso approssimativo | Kg | 0,39 |
||||
Abbinamento DGFox60/Motori
| Taglie |
Tn | 2.5 | 5 | 8 |
10 | 13 |
| B05S | Nm | 0,5 |
0,5 | |||
| B05M | Nm |
0,9 | 0,9 | |||
| B05L | Nm |
1,2 |
1,2 | |||
| B07S | Nm |
1,2 |
1,2 |
|||
| B07M | Nm |
1,9 |
1,9 | |||
| B07L | Nm |
2,6 | ||||
| B07G | Nm | |||||
| B10S | Nm |
|||||
| B10N | Nm | |||||
| SR04M | Nm | 0,32 | ||||
| SR06M | Nm | 1,27 | 1,27 | 1,27 | ||
| SR08L | Nm |
Dimensioni