




调试从未如此容易 |
|
|
Caliper是一个软件工具,通过微软windows操作系统, 可以更容易校准伺服驱动器和电机。其的图形化界面非常直观,通过快速USB2.0接口,可以更快速且方便地访问所有HDT伺服驱动器的功能,操作非常简单。在Caliper上,可以选择您想要使用的应用,保存或下载数据。此外,其还可作为用于微调控制回路的功能强大的专业示波器、自动稳相工具、自动减少电机齿槽的仪器、抑制振动的滤波器,用于检测现场总线的通讯状态以及许多其他功能。这些功能帮助用户将应用调试至最好。 |
|
工作模式及功能 |
|
| 用户可以通过Caliper激活和参数化集成于HDT驱动器上的工作模式及功能,如转速、转矩、转速和转矩极限模式、多定位器、电子轴、电子凸轮和压力控制。对于每个选择的模式,默认情况下I/O是自动配置的,但是可以通过简单直观的菜单任意重新配置,例如可以设置形成电子凸轮的点的值、设置主轴和从轴在电轴上的减速比,在多定位器应用中设置要到达的位置以及许多其他功能。 了解更多..
|
|
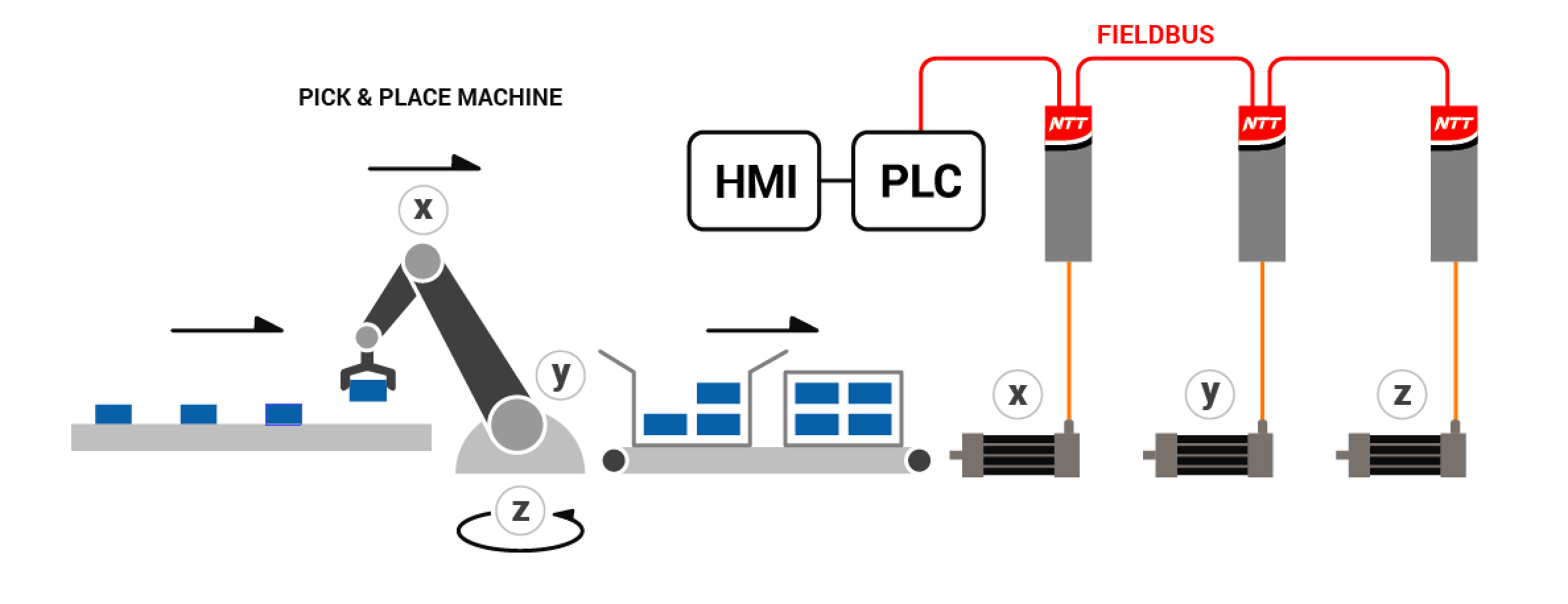
多定位应用 |
|
|
DGFox60 Evo伺服驱动器集成了“多定位器”工作模式和4种可选模式。定位器应用程序生成转速曲线,以在受控的加速度和加速度的情况下再现运动轨迹,从而实现精确定位。这种计算是实时的,允许在不到1毫秒的时间内即时修改位置目标。这样可以快速管理不同的运动轨迹资料。定位器包含一个称为“输入停止”的功能,允许在轨迹执行过程中,当驱动器的数字输入检测到传感器信号时执行受控位置停止。 |
|
单目标定位器 |
|
|
可以通过数字/模拟输入以及所有现场总线激活该模式。以这种方式配置的驱动器允许仅针对位置目标生成轨迹曲线,包括速度,加速,减速和加加速度。这些位置可以是绝对位置或相对位置。使用现场总线,所有参数只能通过电报即时设置,只有Modbus RTU允许同时使用Modbus命令和数字/模拟输入命令以最大的灵活性工作。在没有现场总线的情况下,位置和速度可以通过各自的输入在模拟模式下设置,而其他参数可以通过Caliper软件设置。 |
|
带目标表的定位器 |
|
|
该模式可通过数字/模拟输入以及Modbus RTU和profiNet RT激活。定位器最多可管理64个目标。与单个目标一样,每个目标都可以设置位置、速度、加速、减速和加加速度。这些位置可以是绝对位置或相对位置。通过Caliper或现场总线将目标写入驱动器的列表中。目标可以单独执行或以不同方式衔接组合,从而生成更复杂的配置文件。可以自动循环一系列链接组合目标,并在一个目标和另一个目标之间设置等待时间。 |
|
循环定位器 |
|
|
这种模式类似于从列表中获取目标的定位器,不同之处在于此模式必须严格依次执行目标。可以通过I / O或Modbus RTU手动激活目标。此模式下可以使设置的目标序列具有周期性。 |
|
“输入启动”定位器 |
|
|
此模式无需使用PLC,即可使轴的启动与另一轴位置的到达同步。此模式与之前的不同,因为选择目标或链接目标组的输入将成为目标本身的启动命令。可以在驱动器的每个数字输出上激活“到达位置”信号。因此,将一个DGFox 60 Evo伺服驱动器的达到目标的输出之一与另一个DGFox 60 Evo伺服驱动器的输入相连,就可以同步启动后者。该模式仅适用于数字/模拟输入以及Modbus RTU现场总线。 |
|
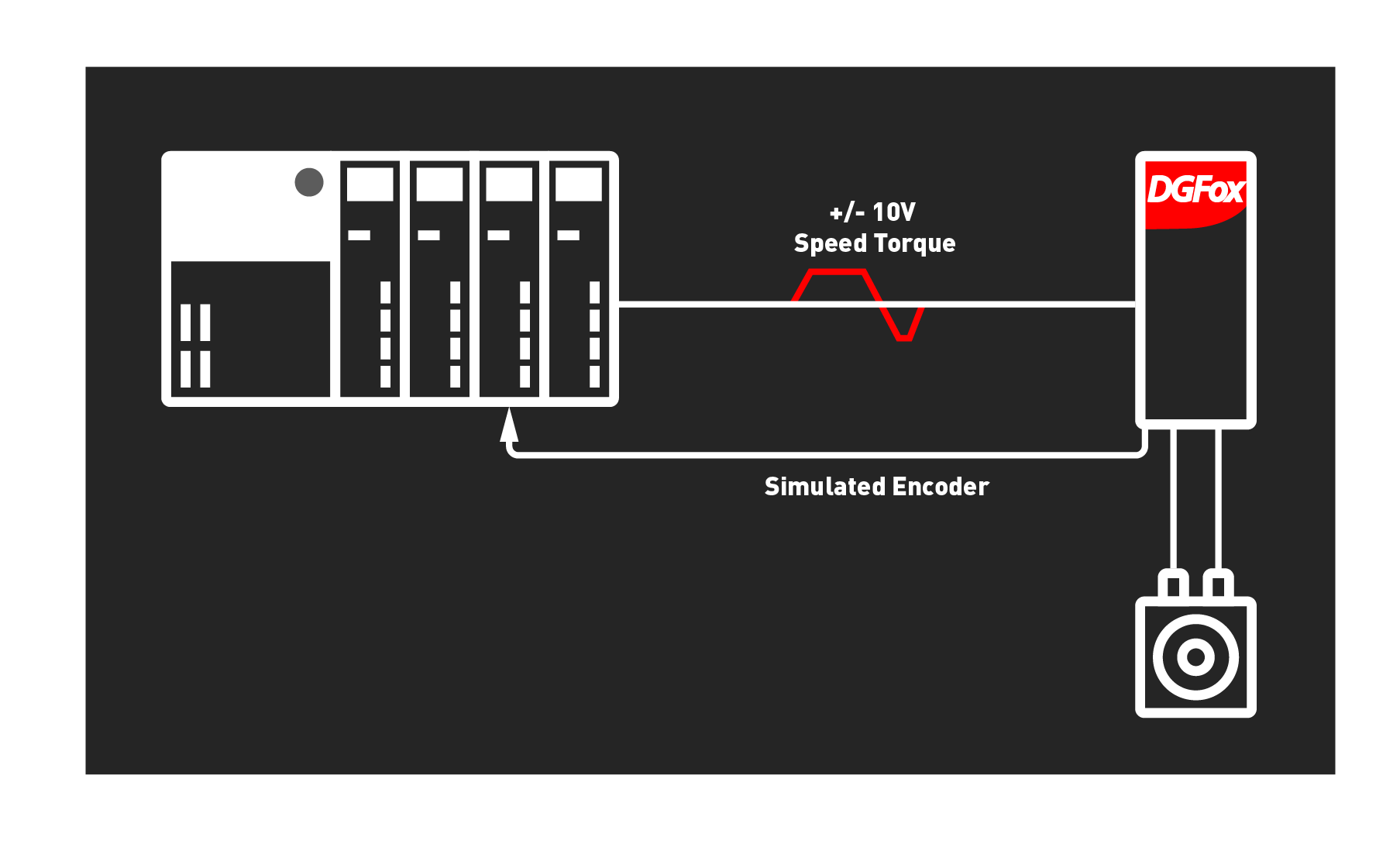
速度控制和转矩限制 |
|
|
速度控制是一种允许通过速度基准控制电机速度的模式,由模拟输入、频率输入或现场总线命令管理。在I / O或Modbus模式下,可以使用附加的模拟辅助转速基准或转矩极限基准。因此可以在速度控制模式下工作,通过设定极限阈值来限制最大转矩。
|
|
转矩控制 |
|
| 转矩控制模式,是通过模拟输入或通过ModBus,CanOpen,EtherCat或Profibus发送的命令管理转矩基准,从而控制电机转矩。转矩基准与电机的额定转矩成比例。根据用户使用的转矩基准类型,在Caliper软件中可以设置不同的参数。例如,模拟输入的满量,最佳PID控制器,以及所需要的数字I / O。 |
|
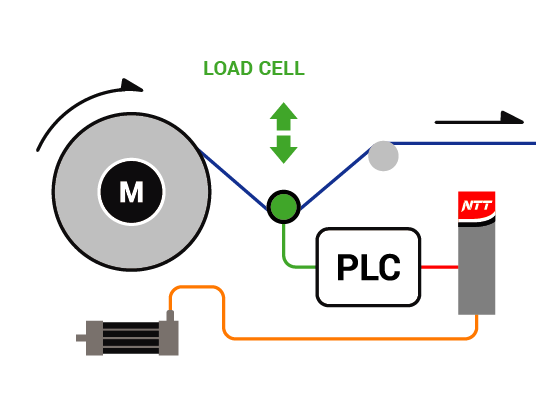
压力控制 |
|
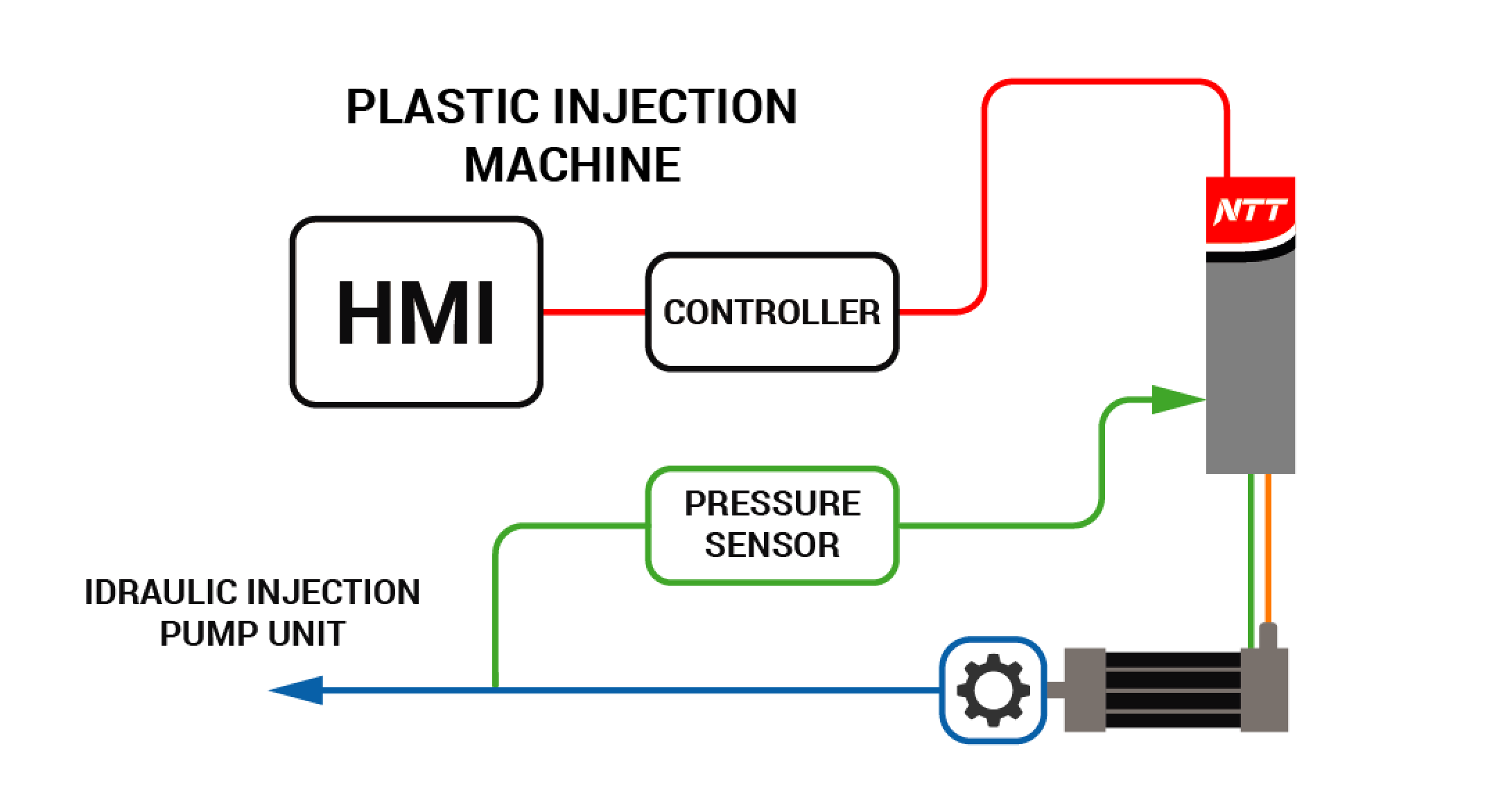
| DGFox 60 Evo伺服驱动器集成了一种称为“压力控制”的操作模式,该模式专门为使用伺服泵的应用(如压力机和注塑机)而设计,这些应用通过伺服驱动器和无刷电机将液压系统与电气调节相结合。 |
|
通过在DGFox 60 Evo伺服驱动器上激活此模式,可以启用三个输入。第一个输入是转速基准信号,用于调节连接到泵的电机转速,从而调节流量。第二个输入是接收压力参考信号,而第三个输入是压力传感器信号(压力反馈)。比较两个压力信号,然后伺服驱动器对转速进行控制,以保持实际压力等于基准值。
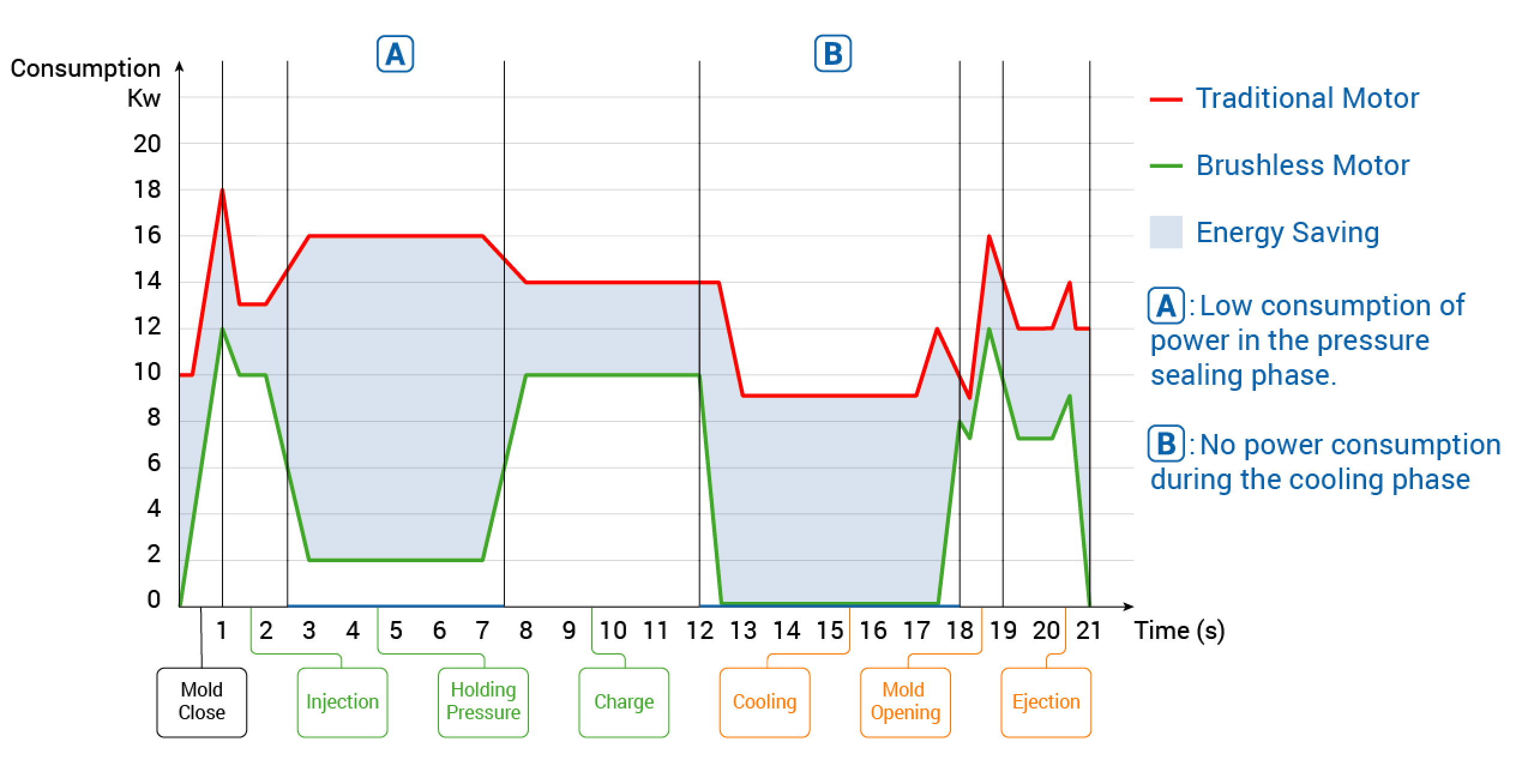
得益于该应用,DGFox 60 Evo与无刷伺服电机的配对使得可以用泵和异步电机代替传统系统,大大提高了系统效率,减少能源消耗,降低油温,取消了比例阀从而简化了液压系统并且改善了压力流量控制,从而提高了产品质量。控制系统响应时间极短,控制精确,从而能够显著提高成型工艺的精度。能够大幅节省能源是因为DGFox 60 Evo允许停止电机以接近零功耗维持系统压力,而在传统的异步电机系统中,即使应用程序不在运行,电机也必须以1500rpm的固定转速旋转以保持系统压力。
因此,配备了DGFox 60 Evo的泵采用变速管理,与始终以固定速度工作的回路相比,即使仅保持压力,也可以降低热量。这改善了低温运行系统中的燃油循环,从而只需要使用小型散热器。伺服驱动器允许最大的重复通量调节,以保证更高的产品质量。此外,在电机中,无刷电机是效率最高,约为95%。更重要的是,该系统更安静且尺寸更小。
电子轴 |
|
| 电子轴是DGFox 60 Evo伺服驱动器的标准功能,允许在一个或多个电机之间设置电子传动比,其中从动轴或者“跟随轴”按照预设传动比跟随主轴。该比率是在从动驱动器中设置的,可以任意修改。主驱动器的运动是通过编码器测量的,该信号被发送至从动驱动器的输入端,从动驱动器按照设定的比率跟随运动。电子轴也是机械传动原理,与减速器、循环滚珠丝杠、齿条或皮带滑轮系统的原理一样。具有机械减速功能的变速箱可以改变转速、增加转矩、并有助于电机和负载之间的惯性匹配。 |
|
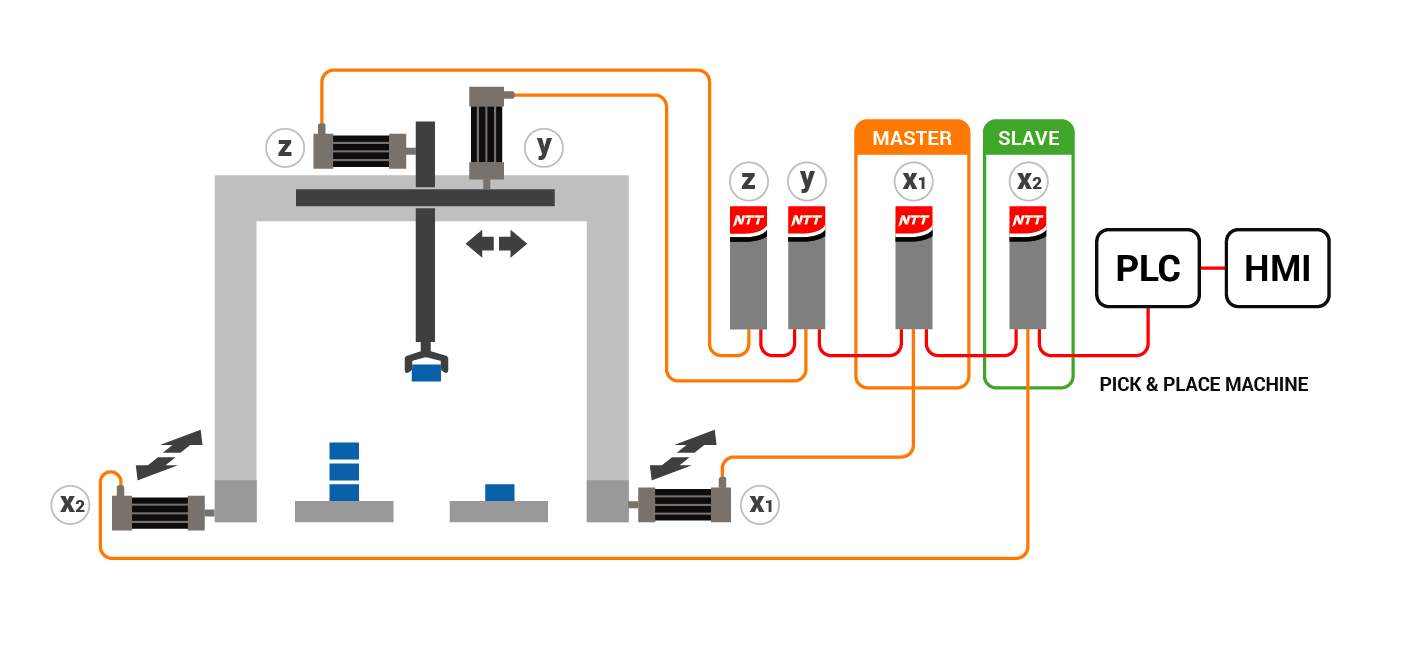
与机械减速相比,电子轴功能仅调节转速,但其优势是允许任意改变并消除机械系统典型的间隙和退化。可以采用不同的电子齿轮比将不同的从动轴连接到单个主动轴。管理电子轴时,重要的是校准从动轴的参数,尤其是响应时间。
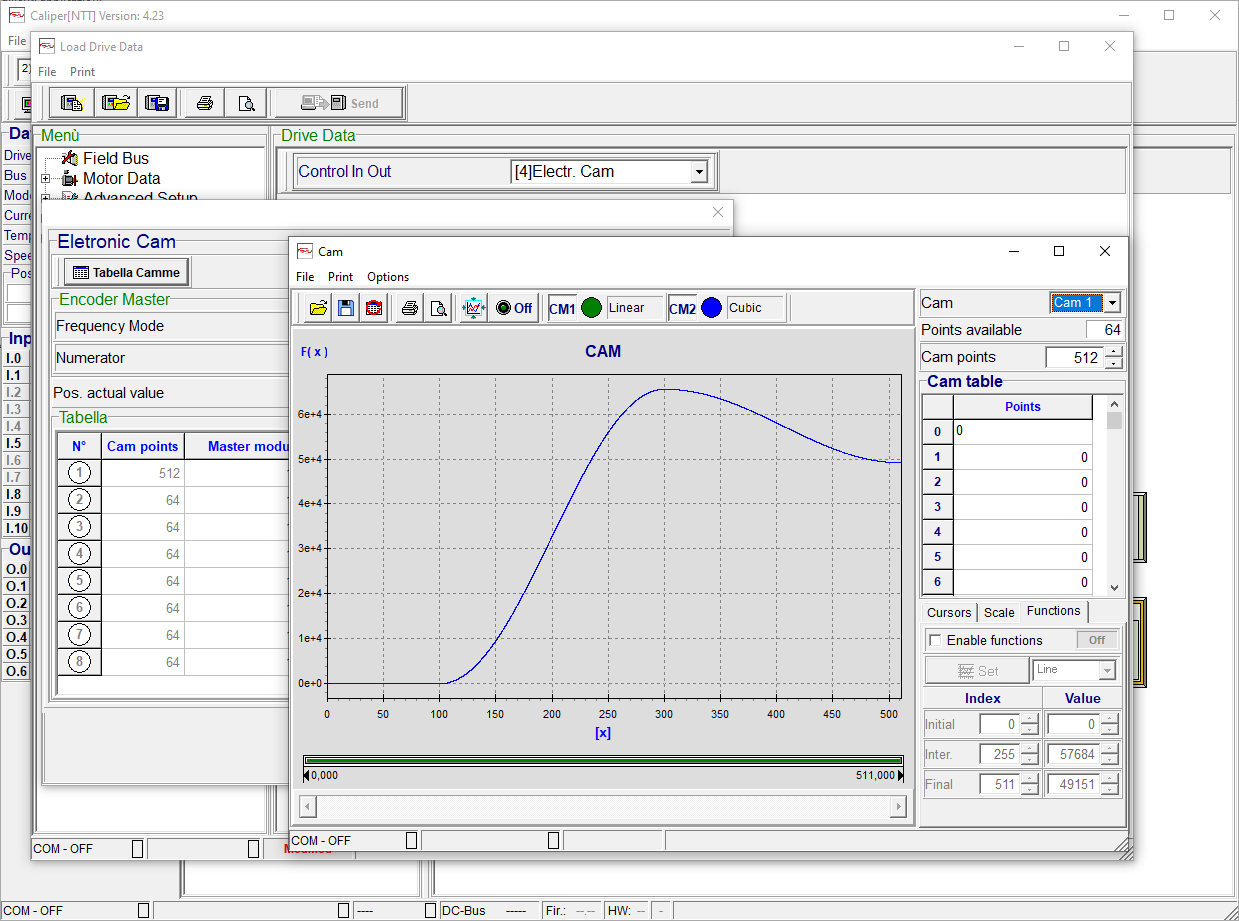
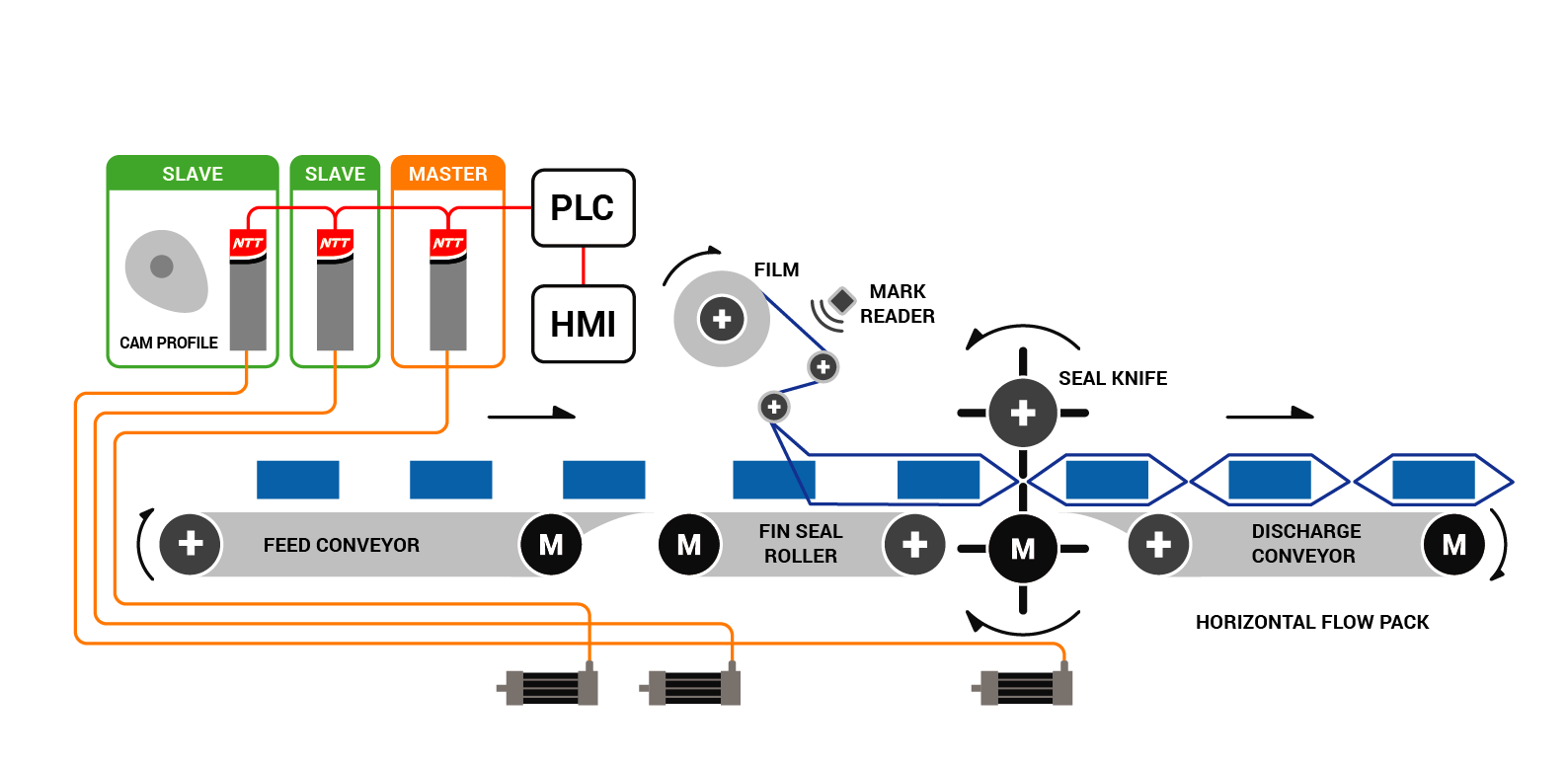
电子凸轮控制 |
|
| 电子凸轮是复制机械凸轮概念的应用程序。机械凸轮是一种轴上形状不规则(通常为卵形)的固定轴的元件,跟随并复制轮廓来移动其他机械零件。在电子凸轮中,机械调节被电子代替。凸轮轮廓通过X / Y表定义,最多可插入576个插补点。不同于机械凸轮的轮廓固定于主轴,电子凸轮的轮廓则是插入到驱动从动电机的伺服驱动器中。 |
|
从动轴接收主轴的空间基准,并复制X / Y表中描述的轮廓,从而生成需要的运动。主轴的信号可以来自外部编码器,也可以来自伺服轴的模拟编码器。与机械凸轮相比,电子凸轮的优势在于可灵活管理多个轮廓,能够在任何时候非常轻松地修改轮廓,尤其是减少了机械间隙以及随之而来的相应调整。